Hi there! I am new to this forum, I’m french and I just bought a second hand Tianchen TC-G158 mower.
I just ordered and received the kit from Marotronics shop and I’m just about to “ardumowerize” my Tianchen.
I read in this forum that some members had already done this successfully, but I absolutely do not speak german, so I create this thread in the English section in the hope that it may also be useful to other Tianchen owners not speaking german.
First of all congratulations for this community project I'm looking forward to making my robot do its first laps with its new brain. I am a complete beginner in dealing with Arduino but it does not look to be too much complicated so here we go !
Herunder my first questions:
I would like initially make the robot run without RC receiver and without the ultrasonic sensors. which are the original
components of the mower that I defenitly need to replace with the ones in the marotronics kit?
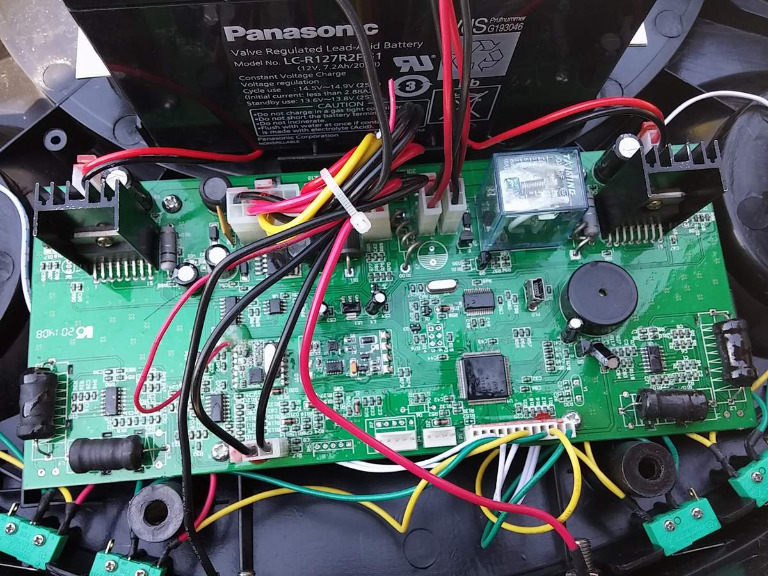
I intend to completely remove the original board, only using the Arduino Mega. Is there any reason why this choice is not possible?
I have not found on the forum any procedure for installation and first testings of the system..
I think I’m going to first test the Bluetooth module so as to interact with the Mega with my Android smartphone. Is it the right way to start or do you think I should better start differently?
May I use the stock Tianchen perimeter with ardumower?
Thanks for your answers and congratulations again for this great project, I will keep you informed of my progress!
I just ordered and received the kit from Marotronics shop and I’m just about to “ardumowerize” my Tianchen.
I read in this forum that some members had already done this successfully, but I absolutely do not speak german, so I create this thread in the English section in the hope that it may also be useful to other Tianchen owners not speaking german.
First of all congratulations for this community project I'm looking forward to making my robot do its first laps with its new brain. I am a complete beginner in dealing with Arduino but it does not look to be too much complicated so here we go !
Herunder my first questions:
I would like initially make the robot run without RC receiver and without the ultrasonic sensors. which are the original
components of the mower that I defenitly need to replace with the ones in the marotronics kit?
I intend to completely remove the original board, only using the Arduino Mega. Is there any reason why this choice is not possible?
I have not found on the forum any procedure for installation and first testings of the system..
I think I’m going to first test the Bluetooth module so as to interact with the Mega with my Android smartphone. Is it the right way to start or do you think I should better start differently?
May I use the stock Tianchen perimeter with ardumower?
Thanks for your answers and congratulations again for this great project, I will keep you informed of my progress!
")






{kind=link}
{kind=link}