Nach langer zeit wieder da ")
Jetzt hab es endlich geschafft mir wieder einen "kleinen" Aufzubauen.
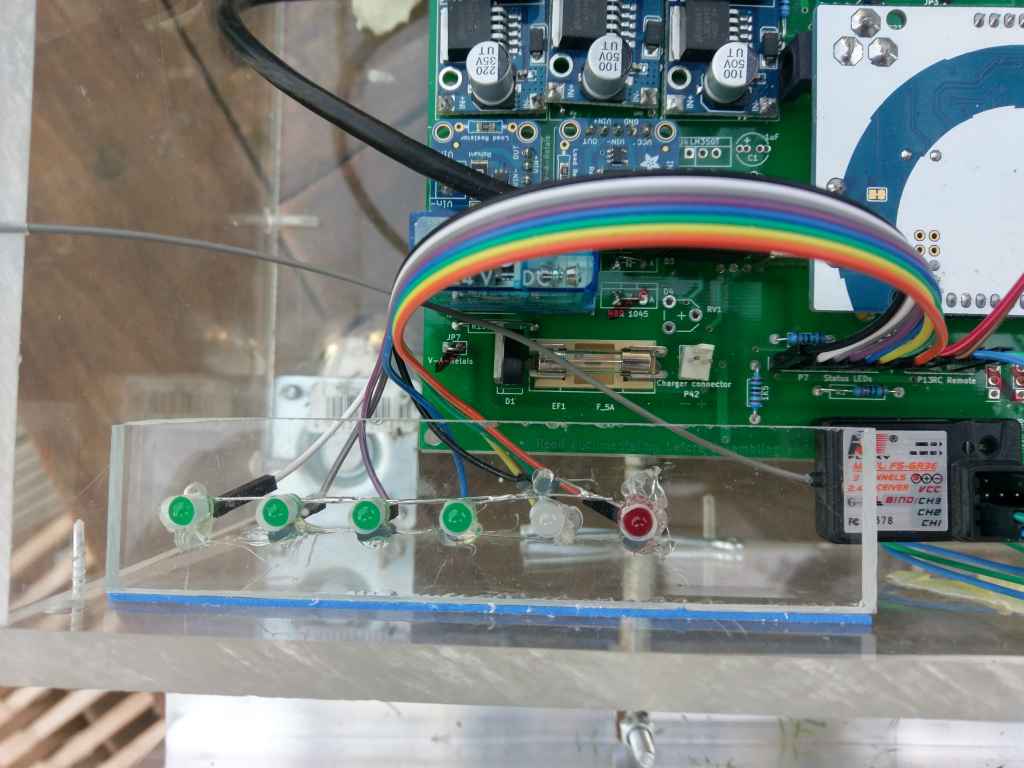
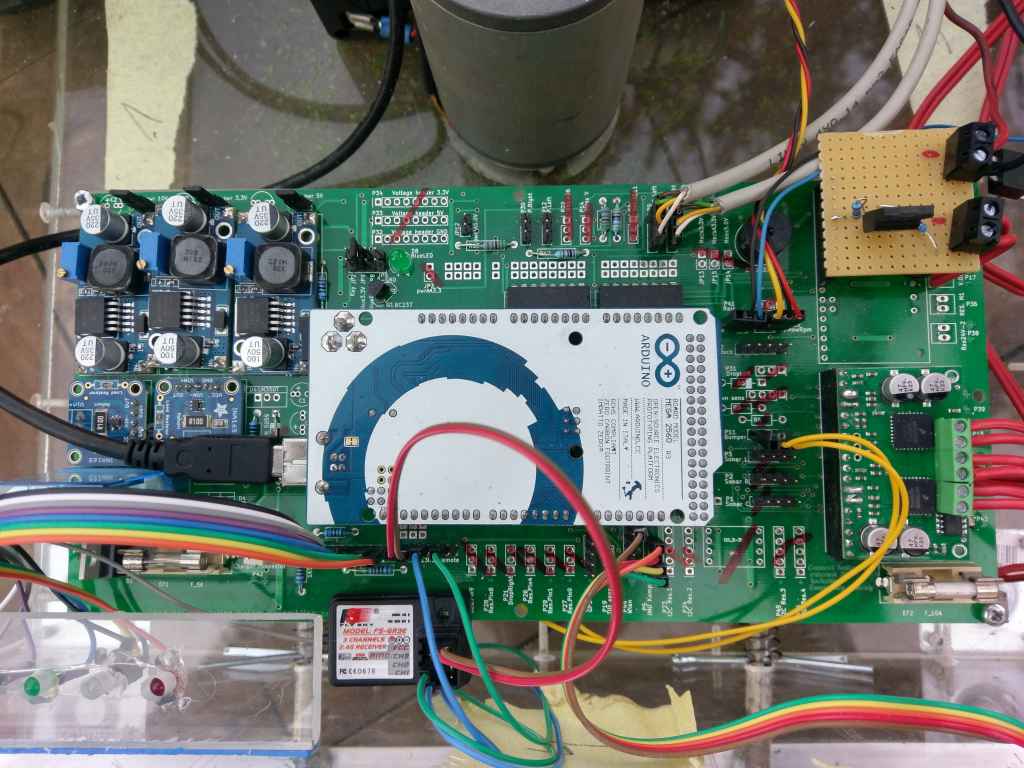
Software erstmal die Azurit 1.0a6 und nur mit Bumper, Odometrie und IMU. US, Perimeter und GPS kommen noch.
Wenn alles läuft wird auf Sunray" getestet.
Auf das Protektor Board habe ich verzichtet, da ich glaube das die abgebrannten Motortreiber mit zu steilen Rampenwinkeln zu tun haben. Dies hatte ich bei den ganz Großen Motoren, die ich mal hatte, auch schon beobachtet.
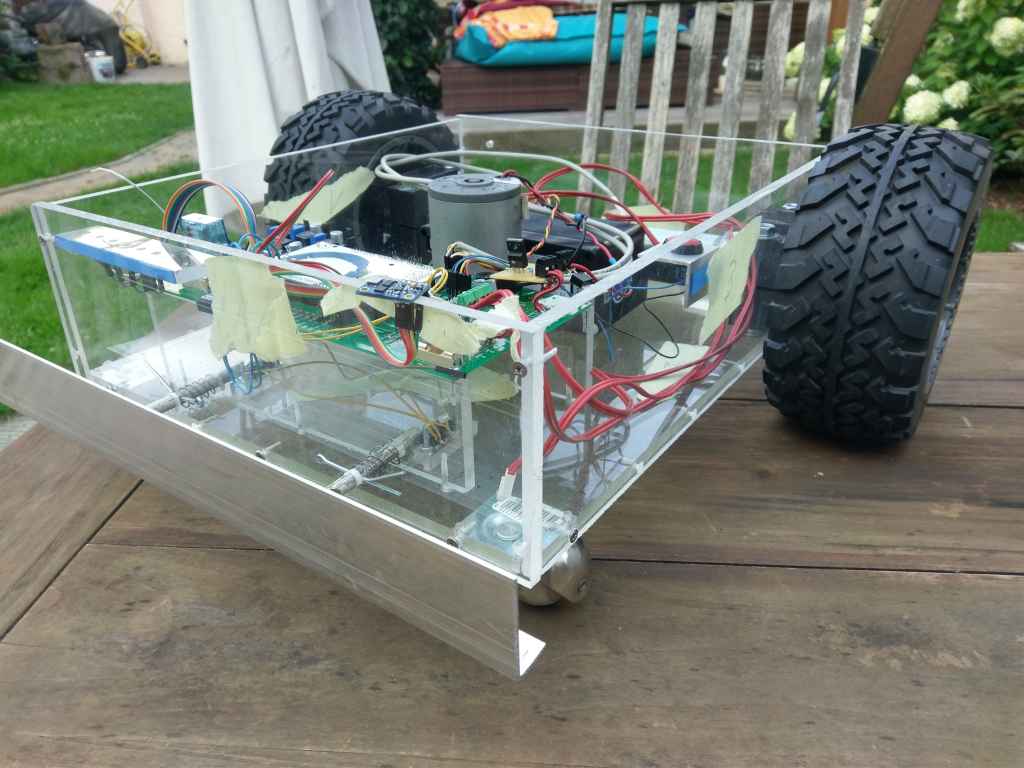
Gestern die ertste Probefahrt im Garten erfolgreich absolviert
und hier ein paar Bild. Fehlt nur noch der Deckel und der Ein/Aus Schalter.
Nach ein paar Einstellungen am Rückwährstfahren und drehen hat er seine Sache auch schon ganz gut gmacht
Bin auf eure Kommentare gespannt.





Jetzt hab es endlich geschafft mir wieder einen "kleinen" Aufzubauen.
Software erstmal die Azurit 1.0a6 und nur mit Bumper, Odometrie und IMU. US, Perimeter und GPS kommen noch.
Wenn alles läuft wird auf Sunray" getestet.
Auf das Protektor Board habe ich verzichtet, da ich glaube das die abgebrannten Motortreiber mit zu steilen Rampenwinkeln zu tun haben. Dies hatte ich bei den ganz Großen Motoren, die ich mal hatte, auch schon beobachtet.
Gestern die ertste Probefahrt im Garten erfolgreich absolviert
und hier ein paar Bild. Fehlt nur noch der Deckel und der Ein/Aus Schalter.
Nach ein paar Einstellungen am Rückwährstfahren und drehen hat er seine Sache auch schon ganz gut gmacht
Bin auf eure Kommentare gespannt.