Hallo,
bestimmt hat sich schon der ein oder andere gefragt ob man nicht elegant erkennen könnte wenn der Ardumower nicht mehr weiter kommt (Hindernisse aller Art) oder stecken geblieben ist (Räder drehen durch). Hier möchte ich eine universelle Lösung vorstellen und ausarbeiten welche ich beim Robomow RC304 ( Video ) abgeguckt habe und wo ich aus eigener Erfahrung mit diesem sagen kann dass die Lösung dort perfekt funktioniert.
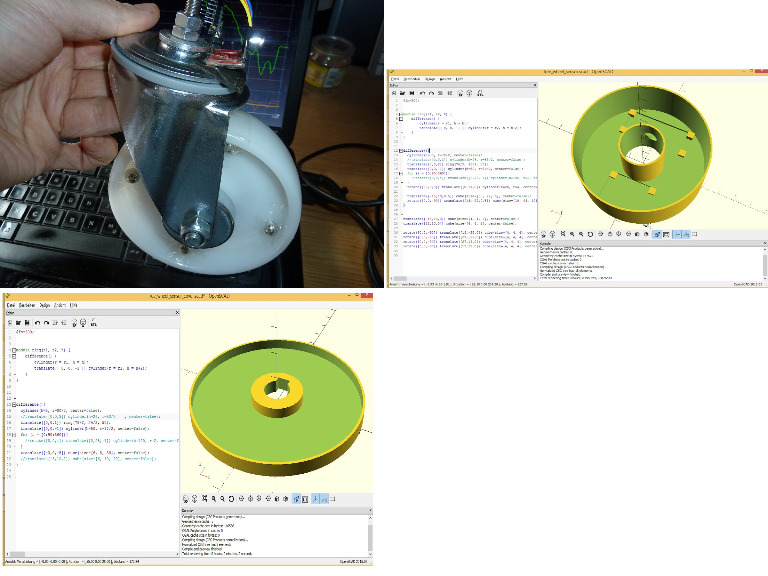
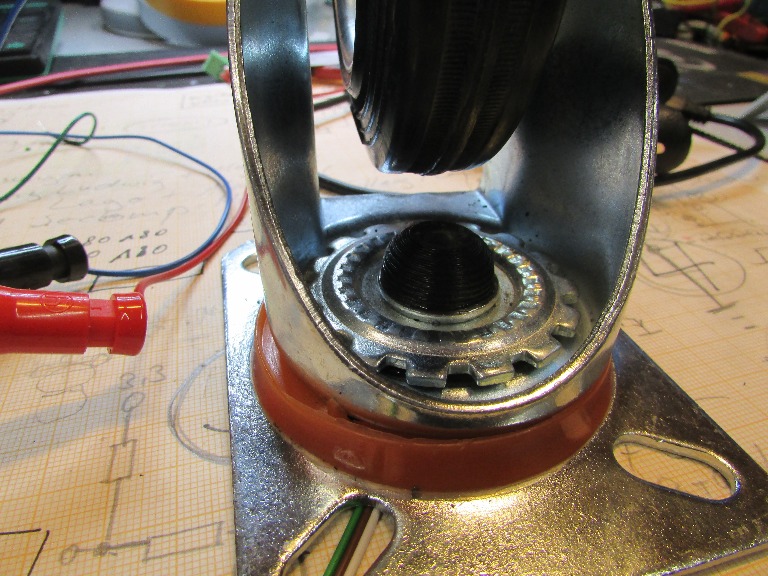
Die Idee ist dass man 4 Magneten (10mm Durchmesser) in das Rad setzt und dann die Änderung des Magnetfeldes detektiert.
Hier ein Video wo ich noch einen Hall-Stromsensor (5A Variante) aus dem Shop verwendet habe: Video .
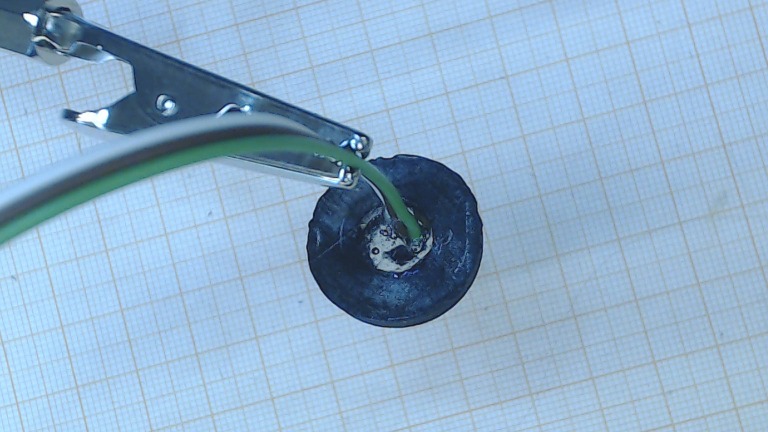
Inzwischen habe ich diesen durch einen Kompass-Sensor (HMC5883L) ersetzt welcher die Änderung des Magnetfeldes in allen 3 Achsen detektieren kann (x,y,z).
Ein 3D-gedrucktes Gehäuse welches man einfach auf die Rolle aufsetzt und welches den Sensor aufnimmt ist in Vorbereitung.
Wenn der Prototyp fertig und mit dem Ardumower ausgetestet ist schreibe ich mehr Details und die einzelnen Schritte hierzu.
Gruss,
Alexander
bestimmt hat sich schon der ein oder andere gefragt ob man nicht elegant erkennen könnte wenn der Ardumower nicht mehr weiter kommt (Hindernisse aller Art) oder stecken geblieben ist (Räder drehen durch). Hier möchte ich eine universelle Lösung vorstellen und ausarbeiten welche ich beim Robomow RC304 ( Video ) abgeguckt habe und wo ich aus eigener Erfahrung mit diesem sagen kann dass die Lösung dort perfekt funktioniert.
Die Idee ist dass man 4 Magneten (10mm Durchmesser) in das Rad setzt und dann die Änderung des Magnetfeldes detektiert.
Hier ein Video wo ich noch einen Hall-Stromsensor (5A Variante) aus dem Shop verwendet habe: Video .
Inzwischen habe ich diesen durch einen Kompass-Sensor (HMC5883L) ersetzt welcher die Änderung des Magnetfeldes in allen 3 Achsen detektieren kann (x,y,z).
Ein 3D-gedrucktes Gehäuse welches man einfach auf die Rolle aufsetzt und welches den Sensor aufnimmt ist in Vorbereitung.
Wenn der Prototyp fertig und mit dem Ardumower ausgetestet ist schreibe ich mehr Details und die einzelnen Schritte hierzu.
Gruss,
Alexander




{kind=link}
{kind=link}