Du verwendest einen veralteten Browser. Es ist möglich, dass diese oder andere Websites nicht korrekt angezeigt werden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Rotenbach Umbau auf Arduino Steuerung
- Ersteller naneona
- Erstellt am
naneona schrieb:So mal ein paar Bilder und ein Filmchen vom ersten Test.
Wie man sieht dreht er zu stark aber das wird beim Feintuning behoben.
Klasse! Das sieht doch schon mal nicht schlecht aus!
")
Mir ist aufgefallen, dass die Zeiten (für Rückwärts/Drehen etc.) für diesen Robot zu lang sind. Daher habe ich diese Zeiten einstellbar gestaltet (Version 0.5.1 von heute).
Du kannst Deine alte Konfiguration verwenden, müsstest aber folgende Zeilen hinzufügen:
#define MAX_ROLL_TIME 2000 // max. roll time (ms)
#define MAX_REV_TIME 1500 // max. reverse time (ms)
Diese Werte sollten besser für den Robot passen.
PS: Damit der Robot durch die nicht angeschlossenen Sensoren nicht wieder verrückt spielt, würde ich z.B. die entsprechenden Zeilen in der Config-Datei auskommentieren:
Beispiel Ladestrom ("readSensor"):
Diese Zeile...
case SEN_CHG_CURRENT: return(analogRead(pinChargeCurrent)-chargeSenseZero); break;
...auskommentieren:
// case SEN_CHG_CURRENT: return(analogRead(pinChargeCurrent)-chargeSenseZero); break;
So wird der Default-Wert (0) für den Ladestrom an das Hauptprogramm zurückgegeben.
Zuletzt bearbeitet von einem Moderator:
nero76 schrieb:naneona schrieb:So mal ein paar Bilder und ein Filmchen vom ersten Test.
Wie man sieht dreht er zu stark aber das wird beim Feintuning behoben.
Klasse! Das sieht doch schon mal nicht schlecht aus!
Mir ist aufgefallen, dass die Zeiten (für Rückwärts/Drehen etc.) für diesen Robot zu lang sind. Daher habe ich diese Zeiten einstellbar gestaltet (Version 0.5.1 von heute).
Du kannst Deine alte Konfiguration verwenden, müsstest aber folgende Zeilen hinzufügen:
#define MAX_ROLL_TIME 2000 // max. roll time (ms)
#define MAX_REV_TIME 1500 // max. reverse time (ms)
Diese Werte sollten besser für den Robot passen.
Klasse, so etwas wollte ich Vorschlagen da bestimmt die Unterschiedlichsten Antriebe zum Einsatz kommen.
Zuletzt bearbeitet von einem Moderator:
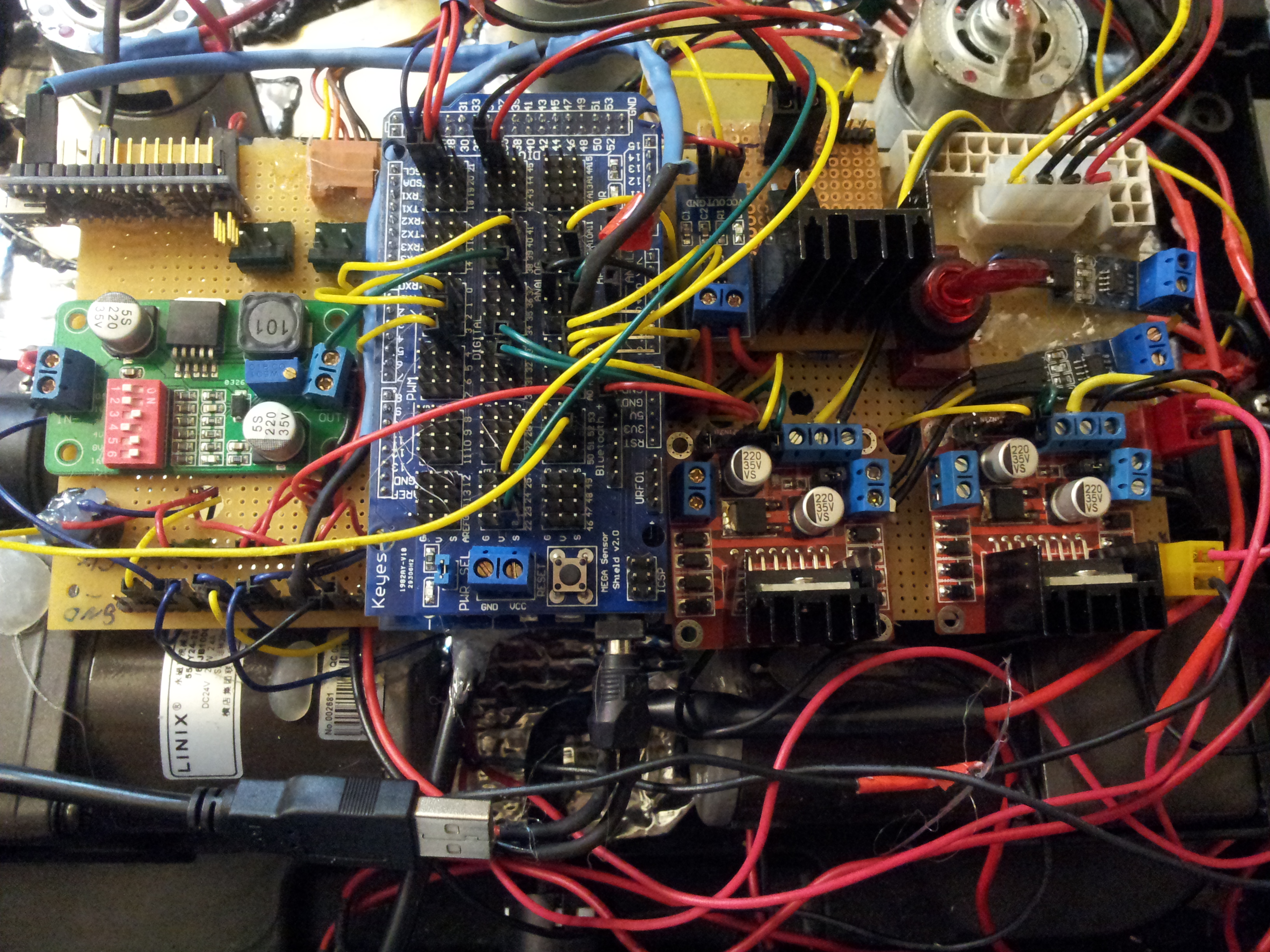
Noch ein paar Daten zum Umbau.
Heißkleber hält das ganze zusammen, macht sich wirklich gut.
Das Mega Board ist unter einem Mega Sensor Shield v2.0 versteckt.
Durch dieses Shield wären die beiden Leisten Links unten unnötig gewesen, da auf dem Shield mehr als genug Spannungs und Masse Anschlüsse vorhanden sind.
Links in der Mitte ist ein DC/DC Wandler der die Spannung vom Akku auf 12V runter wandelt.
Links oben ist Nano Board für die Spulen auswertung.
Auf der rechten Seite ist oben die Steuerung des Mähmotors zu sehen.
Unten die beiden Treiber für die Antriebe.
Um das Sensor Shield aufsetzen zu können musste der USB Anschluss runter, ich habe dann gleich ein USB Kabel angelötet, was sich sehr gut macht.
Änderungen spiele ich mit meinem Ipad Killer ein. :silly:

Attachment: https://forum.ardumower.de/data/media/kunena/attachments/894/hd31ad8d.jpg/
{kind=link}
Zuletzt bearbeitet von einem Moderator:
naneona schrieb:Noch ein paar Daten zum Umbau.
Heißkleber hält das ganze zusammen, macht sich wirklich gut.
Das Mega Board ist unter einem Mega Sensor Shield v2.0 versteckt.
Durch dieses Shield wären die beiden Leisten Links unten unnötig gewesen, da auf dem Shield mehr als genug Spannungs und Masse Anschlüsse vorhanden sind.
Links in der Mitte ist ein DC/DC Wandler der die Spannung vom Akku auf 12V runter wandelt.
Links oben ist Nano Board für die Spulen auswertung.
Auf der rechten Seite ist oben die Steuerung des Mähmotors zu sehen.
Unten die beiden Treiber für die Antriebe.
Um das Sensor Shield aufsetzen zu können musste der USB Anschluss runter, ich habe dann gleich ein USB Kabel angelötet, was sich sehr gut macht.
Änderungen spiele ich mit meinem Ipad Killer ein. :silly:
Eine wirklich tolle Arduino-Steuerungs-Variante! Dieser (nun zweite) Arduino-Eigenbau zeigt, dass eine eigene Steuerung mit einfachen Mitteln problemlos möglich ist.
Ich bin gespannt auf weitere Eigenbau-Varianten
Zuletzt bearbeitet von einem Moderator:
Ich bin gespannt auf weitere Eigenbau-Varianten
Ich auch.
Hier ein neues Video, Zwei spulen pro Seite parallel.
Dadurch konnte ich die Empfindlichkeit zurück nehmen.
Läuft jetzt alles viel präziser.
[video]http://www.youtube.com/watch?v=zglWu2ykDmo[/video]
2 Stunden Einsatz ohne überfahren der Schleife.
markus-lbon-facebook
New member
Alle Rotenbach Umbauer sollten beachten, das die aktuellen Treiber für die Antriebsmotoren etwas schwach sind. (besser den Verwenden STL9958)
Bei extremen Ansteuerungen, z.B. Richtungswechsel unter voller Drehzahl oder beim Blockieren können diese recht schnell abrauchen.
Die Geschwindigkeit der Fahrmotoren mit den STL298N Treibern, sollte auf max. 200 begrenzt werden, besser noch auf 180.
Kleiner Tipp, nach dem abrauchen hatte ich den Treiber gewechselt und der Motor zuckte ständig. Nach dem Messen war klar, der Mega hat was abbekommen und der Ausgang steht ständig unter Spannung.
Dank einem Tipp von Alexander, habe ich in der Config einfach den Ausgang (31 glaube ich) auf einen anderen gesetzt (29) umgesteckt und alles lief.
Gut das es so ging, sonst wäre schon der zweite Mega hinüber.
Bei extremen Ansteuerungen, z.B. Richtungswechsel unter voller Drehzahl oder beim Blockieren können diese recht schnell abrauchen.
Die Geschwindigkeit der Fahrmotoren mit den STL298N Treibern, sollte auf max. 200 begrenzt werden, besser noch auf 180.
Kleiner Tipp, nach dem abrauchen hatte ich den Treiber gewechselt und der Motor zuckte ständig. Nach dem Messen war klar, der Mega hat was abbekommen und der Ausgang steht ständig unter Spannung.
Dank einem Tipp von Alexander, habe ich in der Config einfach den Ausgang (31 glaube ich) auf einen anderen gesetzt (29) umgesteckt und alles lief.
Gut das es so ging, sonst wäre schon der zweite Mega hinüber.
@Markus: habe die Liste der vorgeschlagenen Motortreiber weiter ergänzt... (http://www.ardumower.de/index.php/de/motortreiber)
markus-lbon-facebook
New member
Hallo Alexander,
ich habe auch einen Rotenbach SPM08-320, über den ich jetzt die Kontrolle verloren habe. Er startet normal, fährt dann aber in großem Bogen bis zur Schleife, dreht dann langsam um und teilweise fährt er über die Schleife. Über die Manuelle Fernsteuerung reagiert er nur mehr bedingt.
Ich schätze es ist Zeit für einen Umbau.
Läuft deiner noch wie in der Beschreibung?
Was muss ich denn alles machen um in wieder flot zu bekommen?
Das Bild zeigt meine Hauptplatine im Original.
vielen herzlichen Dank für die Info's.
Liebe Grüße,
Karl-Heinz
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/2942/20140915_154710.jpg/
ich habe auch einen Rotenbach SPM08-320, über den ich jetzt die Kontrolle verloren habe. Er startet normal, fährt dann aber in großem Bogen bis zur Schleife, dreht dann langsam um und teilweise fährt er über die Schleife. Über die Manuelle Fernsteuerung reagiert er nur mehr bedingt.
Ich schätze es ist Zeit für einen Umbau.
Läuft deiner noch wie in der Beschreibung?
Was muss ich denn alles machen um in wieder flot zu bekommen?
Das Bild zeigt meine Hauptplatine im Original.
vielen herzlichen Dank für die Info's.
Liebe Grüße,
Karl-Heinz
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/2942/20140915_154710.jpg/
{kind=link}
Zuletzt bearbeitet von einem Moderator:
Hallo naneona,
kann ich bestehende Elektronik (wie zb. die Ladeeinheit) die ja noch funktioniert im Gerät lassen oder ist es sinnvoll alles rauszuschmeissen und gegen das arduo Projekt zu ersetzen.
Mir gefällt das Projekt, wo ein User den Rotenbach jetzt über das Smartphone komplett steuert.
Kannst du mir sagen welche Komponenten im Shop dafür notwendig sind?
Ich möchte das Projekt jetzt im Herbst starten, damit ich im Frühling beim ersten Graswuchs gleich loslegen kann.
vielen herzlichen Dank für deine (eure) Infos!
Liebe Grüße,
Karl-Heinz
kann ich bestehende Elektronik (wie zb. die Ladeeinheit) die ja noch funktioniert im Gerät lassen oder ist es sinnvoll alles rauszuschmeissen und gegen das arduo Projekt zu ersetzen.
Mir gefällt das Projekt, wo ein User den Rotenbach jetzt über das Smartphone komplett steuert.
Kannst du mir sagen welche Komponenten im Shop dafür notwendig sind?
Ich möchte das Projekt jetzt im Herbst starten, damit ich im Frühling beim ersten Graswuchs gleich loslegen kann.
vielen herzlichen Dank für deine (eure) Infos!
Liebe Grüße,
Karl-Heinz
Hallo, mein Name ist Ede. Bin neu im Forum und noch ziemlich unbelesen...
Doch wie der Zufall so will, stosse ich auf einen Rothenbach-Umbauer. Was ein Glück.
Spiele mit dem Gedanken meinen Rothenbach RR002 auch umzubauen. Kann mir einer helfen mit der Zusammenstellung der benötigten Teile?
@naneona: was sind das für Spulen am vorderen Ende des Robis, sind die für die Schleife?
Doch wie der Zufall so will, stosse ich auf einen Rothenbach-Umbauer. Was ein Glück.
Spiele mit dem Gedanken meinen Rothenbach RR002 auch umzubauen. Kann mir einer helfen mit der Zusammenstellung der benötigten Teile?
@naneona: was sind das für Spulen am vorderen Ende des Robis, sind die für die Schleife?