Möchte meinen RL2000 dafür verwenden.
Ist es möglich die 3 Mähmotoren & die 2 Radmotoren dafür zu verwenden?
Habe sie noch nicht ausgebaut um zu sehen, welche Daten auf den Motoren stehen.
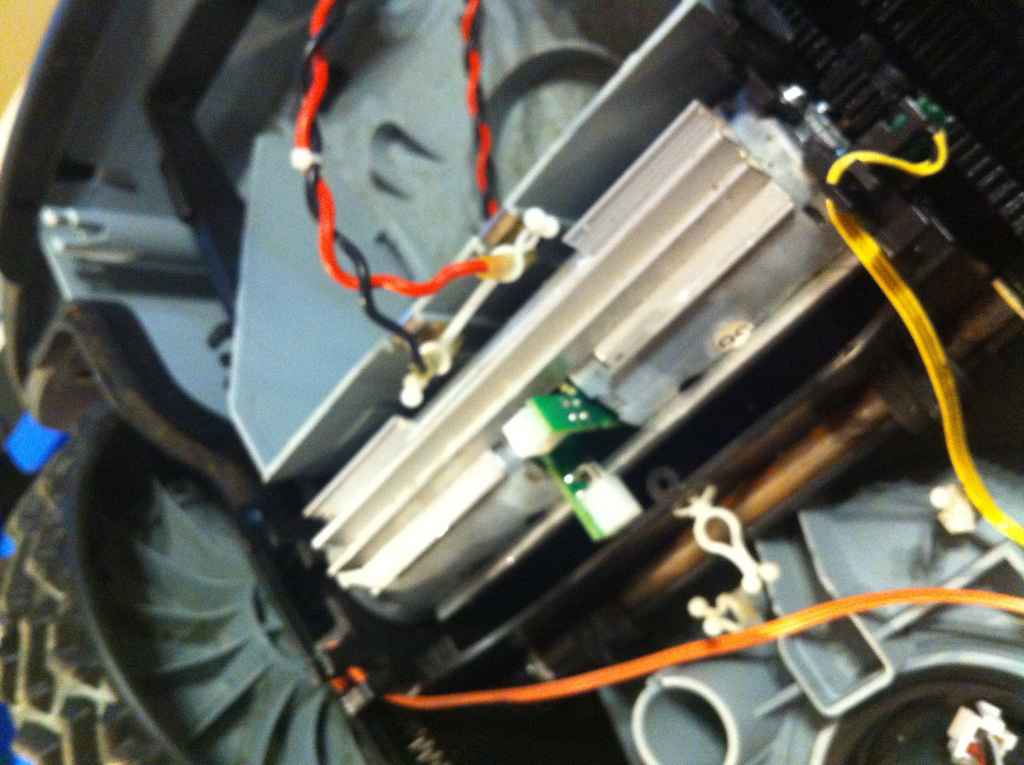
Auf den Mähmotoren (3x) sind ein + und - Kabel und ein J1 und J2 Kabel
Auf den Radmotoren sind 4 Pins mit Stecker
Ist es grundsätzlich möglich diese Motoren zu verwenden?
Brauche ich dann 5 Motortreiber?
Scheint auch so , als wäre ein Odometrie Board montiert..... vl. kann ich dieses auch verwenden?
Soll ich auf die Version 1.3 warten?
Danke vielmals




Ist es möglich die 3 Mähmotoren & die 2 Radmotoren dafür zu verwenden?
Habe sie noch nicht ausgebaut um zu sehen, welche Daten auf den Motoren stehen.
Auf den Mähmotoren (3x) sind ein + und - Kabel und ein J1 und J2 Kabel
Auf den Radmotoren sind 4 Pins mit Stecker
Ist es grundsätzlich möglich diese Motoren zu verwenden?
Brauche ich dann 5 Motortreiber?
Scheint auch so , als wäre ein Odometrie Board montiert..... vl. kann ich dieses auch verwenden?
Soll ich auf die Version 1.3 warten?
Danke vielmals
")
{kind=link}