Nach dem ich letzten Winter mit einen Ardumower gebaut hatte der auch ganz ordentlich diesen Sommer gemäht hat, geht es jetzt in die zweite Runde.
Ich bin nun dabei eine neue Version zu bauen die einige Probleme der ersten Version beheben soll.
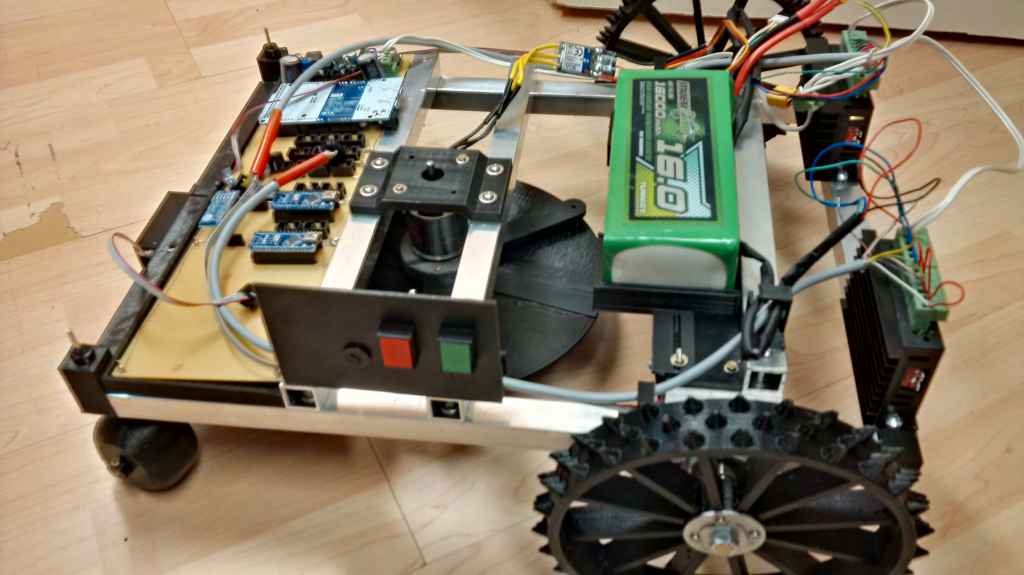
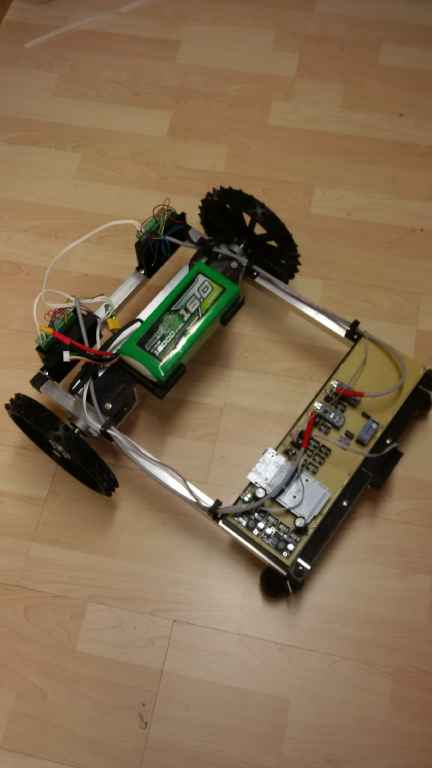
Basiskomponenten:
Alu Rahmenkonstruktion
Kunsttoffteile zum selber drucken
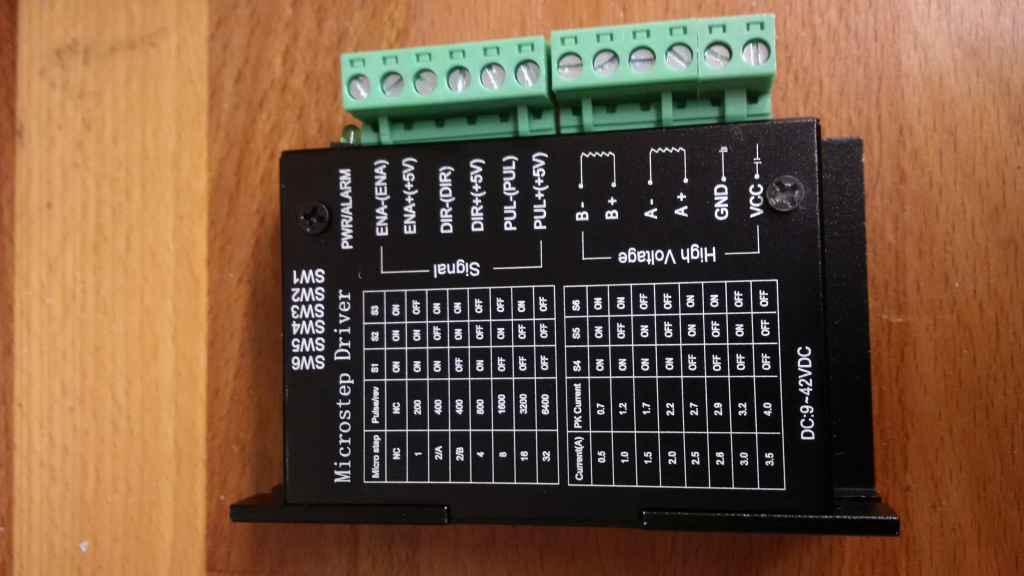
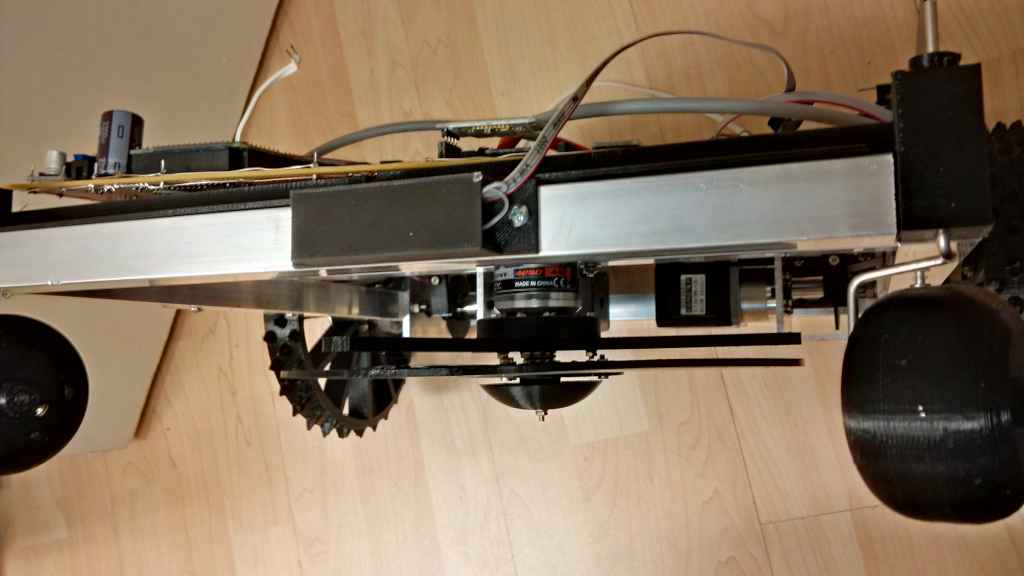
2x Schrittmotoren mit Getriebe für Antrieb
Brushless als Mähmotor
Arduino DUE als zentrale EInheit
2 -4 Arduino Nano für Steuer / Regelaufgaben
16.000 mAH Lipo 14V

Aktueller Stand:
Ich werde hier nun regelmäßig über den Vortschritt berichten.
Ich bin nun dabei eine neue Version zu bauen die einige Probleme der ersten Version beheben soll.
Basiskomponenten:
Alu Rahmenkonstruktion
Kunsttoffteile zum selber drucken
2x Schrittmotoren mit Getriebe für Antrieb
Brushless als Mähmotor
Arduino DUE als zentrale EInheit
2 -4 Arduino Nano für Steuer / Regelaufgaben
16.000 mAH Lipo 14V
Aktueller Stand:
Ich werde hier nun regelmäßig über den Vortschritt berichten.











") ...
... {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}