Du verwendest einen veralteten Browser. Es ist möglich, dass diese oder andere Websites nicht korrekt angezeigt werden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
RC Futaba 40MHZ
- Ersteller kurzschuss
- Erstellt am
kurzschuss
Administrator
und was für ein Fernbedienung?
Uwe
Uwe
kurzschuss
Administrator
Habe das hier noch gefunden: http://www.futaba-forum.net/archive/index.php/t-4429.html?s=983c2a0184708b6f2366320188cd9b75
Die Neutralstellung wird ausschließlich vom Sender bestimmt. Der Empfänger gibt das nur weiter. Spektrum, Graupner & Co. haben die Neutralposition bei 1500µs bestimmt. Bei Futaba ist es hingegen 1520µs. Aus diesem Grund passen die Servos bei einem Wechsel nicht. Außerdem ist der Impulshub und damit der Steuerweg ebenfalls unterschiedlich. Dazu mal eine kleine Tabelle:
1100µs entspricht -100% Graupner und -100% Futaba
1500µs entspricht 0% Graupner und -5% Futaba
1520µs entspricht +5% Graupner und 0% Futaba
1900µs entspricht +100% Graupner und +90% Futaba
1940µs entspricht +110% Graupner und +100% Futaba
// --RC (interrupt)
// RC remote control helper
int Robot::rcValue(int ppmTime){
int value = (int) (((double)((ppmTime) - 1500)) / 3.4);
if ((value < 5) && (value > -5)) value = 0;
return value;
}
Habe das hier mal geändert hat aber keine Auswirkungen gehabt
Ist die Frage inwieweit das überhaupt Auswirkungen hat.
Uwe
Die Neutralstellung wird ausschließlich vom Sender bestimmt. Der Empfänger gibt das nur weiter. Spektrum, Graupner & Co. haben die Neutralposition bei 1500µs bestimmt. Bei Futaba ist es hingegen 1520µs. Aus diesem Grund passen die Servos bei einem Wechsel nicht. Außerdem ist der Impulshub und damit der Steuerweg ebenfalls unterschiedlich. Dazu mal eine kleine Tabelle:
1100µs entspricht -100% Graupner und -100% Futaba
1500µs entspricht 0% Graupner und -5% Futaba
1520µs entspricht +5% Graupner und 0% Futaba
1900µs entspricht +100% Graupner und +90% Futaba
1940µs entspricht +110% Graupner und +100% Futaba
// --RC (interrupt)
// RC remote control helper
int Robot::rcValue(int ppmTime){
int value = (int) (((double)((ppmTime) - 1500)) / 3.4);
if ((value < 5) && (value > -5)) value = 0;
return value;
}
Habe das hier mal geändert hat aber keine Auswirkungen gehabt
Ist die Frage inwieweit das überhaupt Auswirkungen hat.
Uwe
kurzschuss
Administrator
Habe gerade nochmal einen anderen Sender getestet Futaba F14. Das selbe Bild wie bei der F16.
@ Jemihi du hast nicht zufällig einen ganz normalen Servotester den du mal anschließen kannst, weil das bei mir auch nicht funktioniert.
Gruß
Uwe
@ Jemihi du hast nicht zufällig einen ganz normalen Servotester den du mal anschließen kannst, weil das bei mir auch nicht funktioniert.
Gruß
Uwe
kurzschuss
Administrator
Funktioniert den der Stop der Antriebsmotoren über die Android App bis in den Stillstand ?
Wenn das der Fall sein sollte muss ich nochmal die gesamte Verdrahtung durch messen. Sonst habe ich keine Idee mehr.
Gruß
Uwe
Wenn das der Fall sein sollte muss ich nochmal die gesamte Verdrahtung durch messen. Sonst habe ich keine Idee mehr.
Gruß
Uwe
@uwe
Bin leider noch nicht zum testen gekommen aber mit der App ging es definitiv.
Du kannst mal Versuchen, die default settings zu laden.
Ich hatte auch machmal nach dem aufspielen neuer Firmware, die merkwürdigsten Phänomene. Entweder über die app oder über Serielle Konsole.
Stefan
Bin leider noch nicht zum testen gekommen aber mit der App ging es definitiv.
Du kannst mal Versuchen, die default settings zu laden.
Ich hatte auch machmal nach dem aufspielen neuer Firmware, die merkwürdigsten Phänomene. Entweder über die app oder über Serielle Konsole.
Stefan
kurzschuss
Administrator
Default settings habe ich auch schon probiert. Ich hatte heute Abend noch etwas herum gespielt und dabei auch die Kalibrierung des Stromsensors von den Mähmotor gemacht und die Werte in die Arduino Software geschrieben.
Dabei ist mir auch aufgefallen das ein Radmotor dass doppelte an Strom des anderen Motors laut App zieht, was mir komisch vorkommt. Werde auch nochmal die Stromaufnahme beider Motoren messen und die Verdrahtung vom Motortreiber kontrollieren.
Gruß
Uwe
Dabei ist mir auch aufgefallen das ein Radmotor dass doppelte an Strom des anderen Motors laut App zieht, was mir komisch vorkommt. Werde auch nochmal die Stromaufnahme beider Motoren messen und die Verdrahtung vom Motortreiber kontrollieren.
Gruß
Uwe
kurzschuss
Administrator
Nein, Drehrichtungsumkehr funktioniert zwar, aber er Stoppt nicht.
Ich bin noch nicht weiter dazu gekommen die Verdrahtung nochmals durch zumessen. Ich tippe mittlerweile auf ein Verdrahtungsfehler.
Werde nochmals die Verdrahtung vom Motortreiber zum Bord durch messen müssen um das als Fehlerquelle auszuschließen zu können. Verwendest du auch den MC33926 Motortreiber?
Gruß
Uwe
Ich bin noch nicht weiter dazu gekommen die Verdrahtung nochmals durch zumessen. Ich tippe mittlerweile auf ein Verdrahtungsfehler.
Werde nochmals die Verdrahtung vom Motortreiber zum Bord durch messen müssen um das als Fehlerquelle auszuschließen zu können. Verwendest du auch den MC33926 Motortreiber?
Gruß
Uwe
kurzschuss
Administrator
So habe meine Platine ausgebaut. Da ich auch noch ein Sensor Schild darauf sitzen habe war es einfach vom MC33926 Motortreiber zum Schild alle in Frage kommenden Drähte nachzumessen.
Kein Verdrahtungsfehler, Unterbrechung oder Lötbrücke gefunden.
Am Motortreiber sind sind die Jumper Lötbrücken M1_PWM_D1, M1_PWM_D2 und M2_PWM_D1 und M2_PWM_D2 gesetzt.
Die Jumper INV bzw SLEW sind nicht gesetzt. Ist das richtig ?
Einen defekten Motortreiber denke ich kann ich ausschließen den sonst dürften beim Motortest die einzelnen Räder nicht vor und rückwärts drehen bzw stoppen.
Der rechte Motor zieht im Leerlauf ca 0,41A bei 9,9W
Der linke Motor zieht im Leerlauf ca 0,57A bei 12,6W
Ich vermute das der Unterschied in den Stromwerten daher rührt das die Motoren neu und noch nicht eingelaufen sind bzw evl das Getriebe vielleicht ungleich schwergängig ist.
Die Motore sind die aus dem Shop 24V 33Umdrehungen mit Odometry Sensoren
Kann es am Mega Board liegen? Ich habe gesehen das es auch dort Unterschiede gibt.
Reicht ein Arduino Mega 2560Bord aus oder muss es ein Arduino Mega 2560 R3 oder Mera 2560 due sein?
Muss noch irgendwo das verwendete Board konfiguriert werden ?
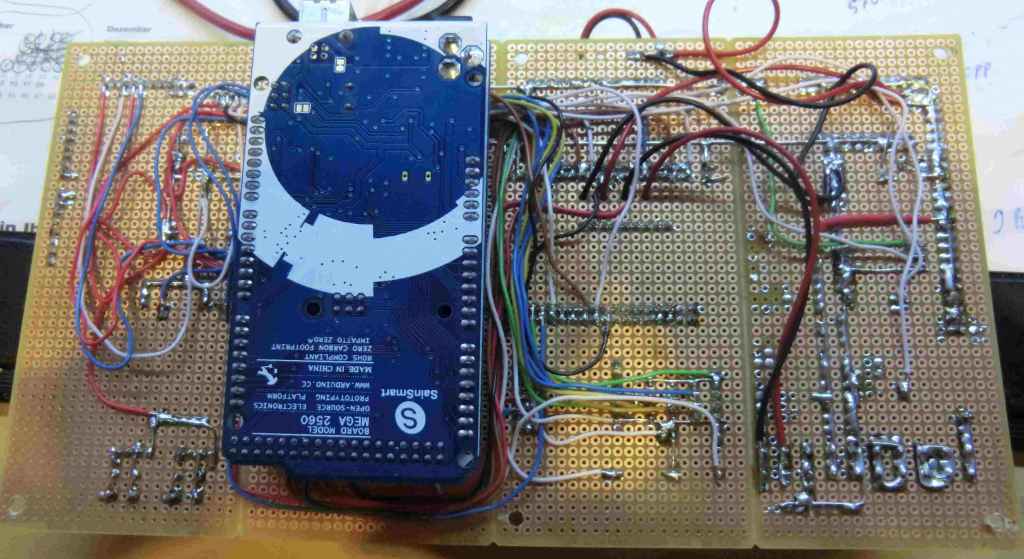
Ich habe mal ein paar Fotos meiner Platine gemacht damit man eine Vorstellung der verbauten Komponenten hat.
Außerdem habe ich mal die Arduino Softwar angefügt die ich zur Zeit verwende. Von mir geänderte Werte sind kommentiert.
Vielleicht kann sich das ja mal jemand ansehen.
Vielleicht hat ja noch jemand eine Idee. Mir fällt jetzt nichts mehr ein und ich bin ratlos.



https://drive.google.com/file/d/0B0G_PTVj9b6MVHBEWTNhX2ptQzg/view?usp=sharing
Gruß Uwe
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/1259/CIMG7175.jpg/
Kein Verdrahtungsfehler, Unterbrechung oder Lötbrücke gefunden.
Am Motortreiber sind sind die Jumper Lötbrücken M1_PWM_D1, M1_PWM_D2 und M2_PWM_D1 und M2_PWM_D2 gesetzt.
Die Jumper INV bzw SLEW sind nicht gesetzt. Ist das richtig ?
Einen defekten Motortreiber denke ich kann ich ausschließen den sonst dürften beim Motortest die einzelnen Räder nicht vor und rückwärts drehen bzw stoppen.
Der rechte Motor zieht im Leerlauf ca 0,41A bei 9,9W
Der linke Motor zieht im Leerlauf ca 0,57A bei 12,6W
Ich vermute das der Unterschied in den Stromwerten daher rührt das die Motoren neu und noch nicht eingelaufen sind bzw evl das Getriebe vielleicht ungleich schwergängig ist.
Die Motore sind die aus dem Shop 24V 33Umdrehungen mit Odometry Sensoren
Kann es am Mega Board liegen? Ich habe gesehen das es auch dort Unterschiede gibt.
Reicht ein Arduino Mega 2560Bord aus oder muss es ein Arduino Mega 2560 R3 oder Mera 2560 due sein?
Muss noch irgendwo das verwendete Board konfiguriert werden ?
Ich habe mal ein paar Fotos meiner Platine gemacht damit man eine Vorstellung der verbauten Komponenten hat.
Außerdem habe ich mal die Arduino Softwar angefügt die ich zur Zeit verwende. Von mir geänderte Werte sind kommentiert.
Vielleicht kann sich das ja mal jemand ansehen.
Vielleicht hat ja noch jemand eine Idee. Mir fällt jetzt nichts mehr ein und ich bin ratlos.
https://drive.google.com/file/d/0B0G_PTVj9b6MVHBEWTNhX2ptQzg/view?usp=sharing
Gruß Uwe
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/1259/CIMG7175.jpg/
{kind=link}
Zuletzt bearbeitet von einem Moderator:
Hallo Uwe,
es sollte ein Arduino Mega 2560 sein. Ob R3 oder nicht ist glaube ich nicht so wichtig.
Der Due währe auch OK braucht dann aber anpassung, da der mit 3,3V läuft.
Zwei Sachen fallen mir auf. Ist der zweite MC33926 für den Mähmotor ? Denn eigentlich reicht einer aus aus und der Mähmotor wird dann über einen Mosfet angesteuert.
Warum hast du ein Mega Breakout Board auf deiner Platine ? Das verendet man eigentlich nur, wenn man leichter an die Pins kommen will und schnell mal was Anstecken oder testen möchte. Wenn man den Mega auf eine Platine baut, hat man die Anschlüsse eh schon auf der Platine ?
Verwendest du den die Anschlüsse auf dem BreakOut, sonst lass es einfach weg.
Für mich hört es sich nach einem Software Problem an. Hast du das Layout nach der 0.9.3 oder nach der SVN Version aufgebaut ?
Welche Software verwendst du ?
Wie verhält sich der Mower mit der Manual Steuerung mit der App ?
Was macht der Mower im Auto Mode ?
Erst mal diese fragen klären, leider hast du nicht geschrieben welche Soft du hast und ob das Problem nur mit der RC oder generell besteht.
Du könntest du aktuelle Software aus dem SVN laden und aufspielen. Die Serielle Konsole starten.
mit d" ins Menü und dann "9" load. Factory setting. Danach den Mower neu starten und noch mal testen.
Stefan
es sollte ein Arduino Mega 2560 sein. Ob R3 oder nicht ist glaube ich nicht so wichtig.
Der Due währe auch OK braucht dann aber anpassung, da der mit 3,3V läuft.
Zwei Sachen fallen mir auf. Ist der zweite MC33926 für den Mähmotor ? Denn eigentlich reicht einer aus aus und der Mähmotor wird dann über einen Mosfet angesteuert.
Warum hast du ein Mega Breakout Board auf deiner Platine ? Das verendet man eigentlich nur, wenn man leichter an die Pins kommen will und schnell mal was Anstecken oder testen möchte. Wenn man den Mega auf eine Platine baut, hat man die Anschlüsse eh schon auf der Platine ?
Verwendest du den die Anschlüsse auf dem BreakOut, sonst lass es einfach weg.
Für mich hört es sich nach einem Software Problem an. Hast du das Layout nach der 0.9.3 oder nach der SVN Version aufgebaut ?
Welche Software verwendst du ?
Wie verhält sich der Mower mit der Manual Steuerung mit der App ?
Was macht der Mower im Auto Mode ?
Erst mal diese fragen klären, leider hast du nicht geschrieben welche Soft du hast und ob das Problem nur mit der RC oder generell besteht.
Du könntest du aktuelle Software aus dem SVN laden und aufspielen. Die Serielle Konsole starten.
mit d" ins Menü und dann "9" load. Factory setting. Danach den Mower neu starten und noch mal testen.
Stefan
kurzschuss
Administrator
Ja das Breakout Board brauche ich da ich da alle Sensoren aufgesteckt habe bis auf die Ultraschallsensoren die dich heraus geführt habe unten links die 4polige Stift Reihe.
Aber ich habe den Fehler gefunden :cheer:
Und zwar hatte ich meiner ersten Platine noch keine Rad Sensoren sprich Odemetrie angeschlossen.
Dies habe ich erst bei meiner 2 jetzigen Platine gemacht und dort auch im Arduino Sketsch aktiviert.
Heute hatte ich die Idee einfach mal die Odemetrie im Arduino Sketsch zu deaktivieren und dann wider zu testen.
Fehler Verschwunden - Oh Wunder :cheer:
Also wider Aktiviert - und Fehler wider vorhanden
Im seriellen Monitor den Odemetrie Test geöffnet.
Beim Vorwärtsfahren beobachtet das die Werte rückwärts gezählt werden bis in den Minus Bereich.
Beim Rückwärtslaufen beobachte das die Werte vorwärts gezählt werde bis in den Plus Bereich.
Die Radsensoren habe ich auf folgende weise angeschlossen: http://www.ardumower.de/index.php/de/anleitungen/2013-11-23-19-50-19/odometrie-gps Das heißt :
grün----GND
braun---VCC
blau----Odometrie1 ( an A12 und A15 )
violett-Odometrie2 ( an A13 und A14 )
Dann habe ich Testweise den Anschluss der Radsensoren geändert.
grün----GND
braun---VCC
blau----Odometrie1 ( an A13 und A14 )
violett-Odometrie2 ( an A12 und A15 )
Und wider getestet
Im seriellen Monitor den Odemetrie Test geöffnet.
Beim Vorwärtsfahren beobachtet das die Werte jetzt Vorwärts gezählt werden in den Plus Bereich.
Beim Rückwärtslaufen beobachte das die Werte jetzt Rückwärts gezählt werde bis in den Minus Bereich.
Jetzt im RC Modus getestet - Oh Wunder - er Stoppt
Daher gleich ein Verbesserungsvorschlag :
Wenn im seriellen Monitor der Odemetrie Test geöffnet wird und dort im Vorwärts Modus die Werte nicht hoch und im Rückwärts betrieb die Werte nicht runtergezählt werden eine Warnmeldung ausgegeben wird, die auf den falschen Anschluss der Odemetrie Sensoren hinweisen.
Ich habe dann nochmal getestet.
Wenn die Sensoren falsch angeschlossen sind tut der Motor im RC Modus und auch in der App nicht stoppen.
Im AutoModus fährt der Motor immer weiter und Rückmeldungen von den Bumber oder Ultraschallsensoren lassen ihn nicht stoppen.
Ein ganz gemeiner Fehler - Man lernt aber nie aus.
Daher gleich ein Verbesserungsvorschlag:
Vielleicht besteht ja die Möglichkeit diesen Fehler bzw das Verhalten über die Software abzufangen bzw eine Warnmeldung auszugeben.
Es fehlt noch im Seriellen Monitor ein spezieller Testmodus, wo man alle Sensoren einzeln durch testen kann und deren Werte und Funktion kontrollieren kann. Ich denke da ähnlich wie die Odemetrie Sensoren das auch mit den Ultraschallsensoren,Regensensor, Bumper, Grassensoren zu machen.
Kann es sein das im Rc Modus der Mover nicht erkennt wenn die Verbindung abreist bzw in der App der Mover manuell fährt nicht erkennt wenn die Verbindung abreist ?
Ich denke wenn das passieren sollte, sollte der Mover eine Warnmeldung ausgeben und stoppen, und dann abwarten bis ein neuer Betriebsmodi gewählt wird.
Gruß
Uwe
Aber ich habe den Fehler gefunden :cheer:
Und zwar hatte ich meiner ersten Platine noch keine Rad Sensoren sprich Odemetrie angeschlossen.
Dies habe ich erst bei meiner 2 jetzigen Platine gemacht und dort auch im Arduino Sketsch aktiviert.
Heute hatte ich die Idee einfach mal die Odemetrie im Arduino Sketsch zu deaktivieren und dann wider zu testen.
Fehler Verschwunden - Oh Wunder :cheer:
Also wider Aktiviert - und Fehler wider vorhanden
Im seriellen Monitor den Odemetrie Test geöffnet.
Beim Vorwärtsfahren beobachtet das die Werte rückwärts gezählt werden bis in den Minus Bereich.
Beim Rückwärtslaufen beobachte das die Werte vorwärts gezählt werde bis in den Plus Bereich.
Die Radsensoren habe ich auf folgende weise angeschlossen: http://www.ardumower.de/index.php/de/anleitungen/2013-11-23-19-50-19/odometrie-gps Das heißt :
grün----GND
braun---VCC
blau----Odometrie1 ( an A12 und A15 )
violett-Odometrie2 ( an A13 und A14 )
Dann habe ich Testweise den Anschluss der Radsensoren geändert.
grün----GND
braun---VCC
blau----Odometrie1 ( an A13 und A14 )
violett-Odometrie2 ( an A12 und A15 )
Und wider getestet
Im seriellen Monitor den Odemetrie Test geöffnet.
Beim Vorwärtsfahren beobachtet das die Werte jetzt Vorwärts gezählt werden in den Plus Bereich.
Beim Rückwärtslaufen beobachte das die Werte jetzt Rückwärts gezählt werde bis in den Minus Bereich.
Jetzt im RC Modus getestet - Oh Wunder - er Stoppt
Daher gleich ein Verbesserungsvorschlag :
Wenn im seriellen Monitor der Odemetrie Test geöffnet wird und dort im Vorwärts Modus die Werte nicht hoch und im Rückwärts betrieb die Werte nicht runtergezählt werden eine Warnmeldung ausgegeben wird, die auf den falschen Anschluss der Odemetrie Sensoren hinweisen.
Ich habe dann nochmal getestet.
Wenn die Sensoren falsch angeschlossen sind tut der Motor im RC Modus und auch in der App nicht stoppen.
Im AutoModus fährt der Motor immer weiter und Rückmeldungen von den Bumber oder Ultraschallsensoren lassen ihn nicht stoppen.
Ein ganz gemeiner Fehler - Man lernt aber nie aus.
Daher gleich ein Verbesserungsvorschlag:
Vielleicht besteht ja die Möglichkeit diesen Fehler bzw das Verhalten über die Software abzufangen bzw eine Warnmeldung auszugeben.
Es fehlt noch im Seriellen Monitor ein spezieller Testmodus, wo man alle Sensoren einzeln durch testen kann und deren Werte und Funktion kontrollieren kann. Ich denke da ähnlich wie die Odemetrie Sensoren das auch mit den Ultraschallsensoren,Regensensor, Bumper, Grassensoren zu machen.
Kann es sein das im Rc Modus der Mover nicht erkennt wenn die Verbindung abreist bzw in der App der Mover manuell fährt nicht erkennt wenn die Verbindung abreist ?
Ich denke wenn das passieren sollte, sollte der Mover eine Warnmeldung ausgeben und stoppen, und dann abwarten bis ein neuer Betriebsmodi gewählt wird.
Gruß
Uwe
kurzschuss
Administrator
"Mit der Erkennung ob eine Verbindung besteht, wird das schon schwieriger, denke ich."
Mit der Bluetoth Verbindung weiß ich es nicht
Bei RC müsste es eigentlich einfach sein
Normal sind folgende Werte aus meinen Testprogramm: ( muss noch umgerechnet werden)
Kanal -- Max -- Mitte -- Min
10 ---- 21217 --- 20800 --- 20336
11 ---- 21216 --- 20806 --- 20339
12 ---- 21333 --- 20790 --- 20245
Bei Sendeausfall ändern sich die Werte unter 20000 und über 21500
Das heißt wenn die Werte in diesen Bereich rein springen müsste er stoppen.
Aber eine andere Frage habe ich noch was mich noch interessieren würde.
Ich habe gelesen das der Mover mit einem Zustandsautomat arbeiten tut.
Gibt es eine Möglichkeit den momentanen Zustand des Mover auszulesen z.B über eine App oder dem Seriellen Monitor.
Gibt es mal eine Übersicht über die möglichen Zustände
Wie ruft man diese Zustände auf bzw. wechselt diese oder verlässt diese wider?
Gibt es da mal ein einfaches Beispiel damit ich das nachvollziehen kann ?
Gruß
Uwe
Mit der Bluetoth Verbindung weiß ich es nicht
Bei RC müsste es eigentlich einfach sein
Normal sind folgende Werte aus meinen Testprogramm: ( muss noch umgerechnet werden)
Kanal -- Max -- Mitte -- Min
10 ---- 21217 --- 20800 --- 20336
11 ---- 21216 --- 20806 --- 20339
12 ---- 21333 --- 20790 --- 20245
Bei Sendeausfall ändern sich die Werte unter 20000 und über 21500
Das heißt wenn die Werte in diesen Bereich rein springen müsste er stoppen.
Aber eine andere Frage habe ich noch was mich noch interessieren würde.
Ich habe gelesen das der Mover mit einem Zustandsautomat arbeiten tut.
Gibt es eine Möglichkeit den momentanen Zustand des Mover auszulesen z.B über eine App oder dem Seriellen Monitor.
Gibt es mal eine Übersicht über die möglichen Zustände
Wie ruft man diese Zustände auf bzw. wechselt diese oder verlässt diese wider?
Gibt es da mal ein einfaches Beispiel damit ich das nachvollziehen kann ?
Gruß
Uwe
Die Zustände werden dir in der Seriellen Konsole angezeigt. ganz links
Console_Output
und eigentlich hast du da auch schon die Testfunktion die meintest. Wenn du die Ausgabe mit "V " umschaltest, erhälst du die alle Sensorwerte, die man braucht.
Ich bocke den Mower auf der Werkbank auf und und lasse die Konsole mitlaufen, um die Werte zu sehen.
Alex ist im Augenblick wohl sehr mit der Optischen Navigation beschäftigt. Ich kann ja mal versuchen wir das anzusehen.
Ich bin sowieso der Meinung das wir mal einen ReleasCandidat machen sollten, die letzten Fehler ausbügeln usw. bevor neue Funktionen dazukommen.
Stefan
Console_Output
und eigentlich hast du da auch schon die Testfunktion die meintest. Wenn du die Ausgabe mit "V " umschaltest, erhälst du die alle Sensorwerte, die man braucht.
Ich bocke den Mower auf der Werkbank auf und und lasse die Konsole mitlaufen, um die Werte zu sehen.
Alex ist im Augenblick wohl sehr mit der Optischen Navigation beschäftigt. Ich kann ja mal versuchen wir das anzusehen.
Ich bin sowieso der Meinung das wir mal einen ReleasCandidat machen sollten, die letzten Fehler ausbügeln usw. bevor neue Funktionen dazukommen.
Stefan
markus-lbon-facebook
New member
StefanM schrieb:Ich bin sowieso der Meinung das wir mal einen ReleasCandidat machen sollten, die letzten Fehler ausbügeln usw. bevor neue Funktionen dazukommen.
Stefan
Jepp, daher ist die SVN241 zur aktuellen Software gemacht worden.
Hat jemand die 241 drauf und kann mir sagen, ob die RC Funktion dort läuft.
Ich bekomme es hier nicht zum laufen.
Markus
Zuletzt bearbeitet von einem Moderator:
kurzschuss
Administrator
Ich habe die 242 drauf und RC funktioniert nach anfänglichen Problemen