
{kind=link}
Zuletzt bearbeitet von einem Moderator:
Du verwendest einen veralteten Browser. Es ist möglich, dass diese oder andere Websites nicht korrekt angezeigt werden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Projekt läuft :)
- Ersteller alex76
- Erstellt am
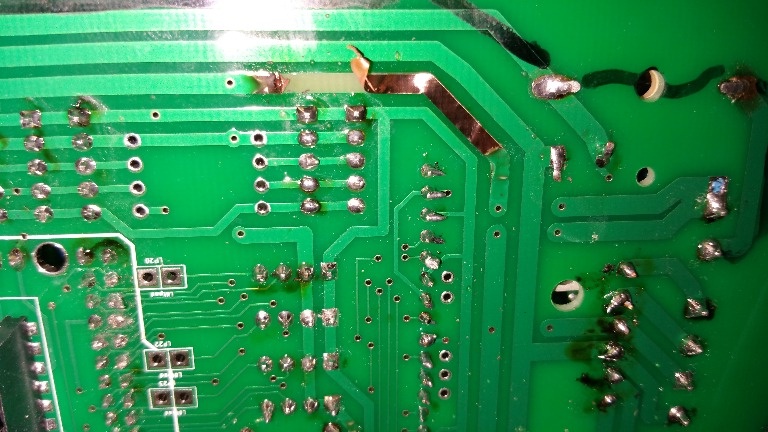
Da ist das Malheur
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/4154/20170515_190703.jpg/
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/4154/20170515_190703.jpg/
{kind=link}
Zuletzt bearbeitet von einem Moderator:
So siehts im Moment aus.. damit bin ich bereits recht zufrieden. Allerdings kommen jetzt nachträglich nach viel Zeit und Nerven die Shopmotoren rein, weil ich doch die Präzision vermisse (Odo)
[attachment=4160]IMG_20170822_165329.jpg[/attachment]
links ist 'Petzi's Feld' nach einer Akkuladung
[attachment=4161]15034146425421550333067.jpg[/attachment]
Wo ist wohl der IMU ? [attachment=4159]IMG_20170822_165346.jpg[/attachment]
gps/regen
Sonderschule Abteilung Holzwerkstatt:
[attachment=4157]IMG_20170822_165415.jpg[/attachment]
Sensorik bumper
[attachment=4156]IMG_20170822_165439.jpg[/attachment]
230er aufnah!eteller für Flex (für sandpapier) 4x klingen v. Kik (ceranfeldschaber 1,19 €mit 5 klingen)
Badass
[attachment=4154]IMG_20170822_165517.jpg[/attachment]
System lüppt einigermassen, jetzt kommt optimierung
Übrigends: ab einer Batteriespannung von unter 21,7 V ist Petzi unterzuckert und fährt im Zombie-mode :evil:
( Kann jemand programmieren das im Zombiemode 2 rote LED's angehen-> für die Augen ? XD
[attachment=4160]IMG_20170822_165329.jpg[/attachment]
links ist 'Petzi's Feld' nach einer Akkuladung
[attachment=4161]15034146425421550333067.jpg[/attachment]
Wo ist wohl der IMU ? [attachment=4159]IMG_20170822_165346.jpg[/attachment]
gps/regen
Sonderschule Abteilung Holzwerkstatt:
[attachment=4157]IMG_20170822_165415.jpg[/attachment]
Sensorik bumper
[attachment=4156]IMG_20170822_165439.jpg[/attachment]
230er aufnah!eteller für Flex (für sandpapier) 4x klingen v. Kik (ceranfeldschaber 1,19 €mit 5 klingen)
Badass
[attachment=4154]IMG_20170822_165517.jpg[/attachment]
System lüppt einigermassen, jetzt kommt optimierung
Übrigends: ab einer Batteriespannung von unter 21,7 V ist Petzi unterzuckert und fährt im Zombie-mode :evil:
( Kann jemand programmieren das im Zombiemode 2 rote LED's angehen-> für die Augen ? XD
elektronikjogi
Moderator
Sehr originell. :lol:
Gruß
Jürgen
Gruß
Jürgen
Wie angekündigt habe ich nun dem Robby doch die Shopmotoren spendiert, wo ich schon dabei war habe ich gleich den Mähmotor mit Teller mit eingetütet.
Der Unterschied ist grandios ! Der Robby läuft wesentlich zuverlässiger ! Soweit nimmt er die Steigungen, reagiert auf die Bumper artgerecht.
Derzeit optimiere ich das Sonar, da bremst er tlw. sauber ab. Manchmal auch nicht.. Dazu musste das Sonar 30cm hoch. Darunter gabs zu viel Störungen. Einzig GPS habe ich deaktiviert, da der Robby plötzlich sternförmig am platz hin und her fuhr bis das GPS robo-Stuck gemeldet hat.. Mit deaktiviertem GPS hat er scheinbar das Problem nicht.
Der Unterschied ist grandios ! Der Robby läuft wesentlich zuverlässiger ! Soweit nimmt er die Steigungen, reagiert auf die Bumper artgerecht.
Derzeit optimiere ich das Sonar, da bremst er tlw. sauber ab. Manchmal auch nicht.. Dazu musste das Sonar 30cm hoch. Darunter gabs zu viel Störungen. Einzig GPS habe ich deaktiviert, da der Robby plötzlich sternförmig am platz hin und her fuhr bis das GPS robo-Stuck gemeldet hat.. Mit deaktiviertem GPS hat er scheinbar das Problem nicht.
So ich hab mal den zwischenstand fotografiert.
Die Motoren sind direkt an die Wandung geschraubt und mit einer Rohrschelle am ende gesichert. Sehr einfach und trotzdem stabil (trägt mich 70kg)
Ein Perimeterempfänger hat einen Wackelkontakt gehabt, dadurch fuhr er immer mit unterbrechungen. Im Plot konnte man das aber gut erkennen. Nach dem Austausch perfekt.
Die Station ist optisch noch eine katastrophe, jedoch musste ich die Führung und das Dockingsystem oft nachjustieren bis es funktionierte.
Aber so läuft er erstmal richtig zufriedenstellend.
Danke nochmal an alle die direkt oder indirekt mitgewirkt haben !

Attachment: https://forum.ardumower.de/data/media/kunena/attachments/4154/20170921_170829.jpg/
Die Motoren sind direkt an die Wandung geschraubt und mit einer Rohrschelle am ende gesichert. Sehr einfach und trotzdem stabil (trägt mich 70kg)
Ein Perimeterempfänger hat einen Wackelkontakt gehabt, dadurch fuhr er immer mit unterbrechungen. Im Plot konnte man das aber gut erkennen. Nach dem Austausch perfekt.
Die Station ist optisch noch eine katastrophe, jedoch musste ich die Führung und das Dockingsystem oft nachjustieren bis es funktionierte.
Aber so läuft er erstmal richtig zufriedenstellend.
Danke nochmal an alle die direkt oder indirekt mitgewirkt haben !
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/4154/20170921_170829.jpg/
{kind=link}
Zuletzt bearbeitet von einem Moderator:
Zunden Fotos:
Die Dockingstation besteht aus 2x 40cm Kupferrohr mittig gebohrt(drehpunkt) und locker angeschraubt . Kabel angelotet und am ende ein Gummispanner der die rohre (Kontakte) zurückfedert mit 15 cm Federweg.
Die Sonars sind provisorisch da ich diese noch optimieren möchte. (2. Modul ist ein US015 Sonar = Vergleichtest)
Da die "Sternfahrt" scheinbar am wackeligen Peri-Empfänger lag müsste ich mal das gps nochmal testen, weil das wohl nur aus der konsequenz, das Robby perimeterlos-desorientiert was, den Stillstand meldete.
Achtung: die Spule am Empfänger ist sehr instabil. am besten nicht belasten. (2 Spulen bereits vergurkt))
Aber primär werde ich jetzt den Nutzen geniessen und das tüfteln überwiegend ruhen lassen.
Das alte gehäuse hatte 1000 Löcher vom vielen ausprobieren, daher habe ich eine neue Box geholt, damit kein Wasser eindringen kann. Einen kräftigen Schauer hat er bereits überstanden.
Die Dockingstation besteht aus 2x 40cm Kupferrohr mittig gebohrt(drehpunkt) und locker angeschraubt . Kabel angelotet und am ende ein Gummispanner der die rohre (Kontakte) zurückfedert mit 15 cm Federweg.
Die Sonars sind provisorisch da ich diese noch optimieren möchte. (2. Modul ist ein US015 Sonar = Vergleichtest)
Da die "Sternfahrt" scheinbar am wackeligen Peri-Empfänger lag müsste ich mal das gps nochmal testen, weil das wohl nur aus der konsequenz, das Robby perimeterlos-desorientiert was, den Stillstand meldete.
Achtung: die Spule am Empfänger ist sehr instabil. am besten nicht belasten. (2 Spulen bereits vergurkt))
Aber primär werde ich jetzt den Nutzen geniessen und das tüfteln überwiegend ruhen lassen.
Das alte gehäuse hatte 1000 Löcher vom vielen ausprobieren, daher habe ich eine neue Box geholt, damit kein Wasser eindringen kann. Einen kräftigen Schauer hat er bereits überstanden.