Hallo Zusammen,
ich habe ein Problem mit meinem Mower, bzw. vorrangig mit der Odometrie. Gleich vorneweg, der Mower war noch nie im Dauereinsatz, immer nur Testfahrten. Konnte noch nie einen Stand erreichen der richtig lauffähig war. Zur Zeit habe ich die azuritber Firmware drauf, mit der habe ich "nur Odometrie Fehler".
Im Wiki steht was das man mindestens 400 Impulse pro Umdrehung haben sollte, soviele bekomme ich leider nicht hin. Bei mir sind das nur ca. 212/Umd.
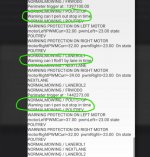
Ich habe Motoren aus dem Shop, dürften wohl noch von den ersten sein. Schwarze Kappe mit Kabelschwanz, die workourounds mit dem entstören hatte ich damals auch gleich gemacht. Habe versucht so gut wie ich konnte die Vorgehensweise im Wiki zu der Firmware umzusetzen, doch leider klemmt da immer noch was. Wenn ich den Mower im Automodus starte fährt er einen guten halben Meter vor und bleibt dann stehen. Danach eine 90 Grad Drehung, das gleiche dann wieder. Nach der zweiten oder dritten Drehung geht er dann in den Spiralmodus, dann kommt kurz darauf der eigentliche Fehler, Odo Motor rechts.
Das ist bei jedem Start ein sehr ähnliches Verhalten, so ganz sicher wo ich ansetzen soll bin ich nicht. Verkabelung, Stecker, Kabelverlegung habe ich mehrfach nachgesehen, mir fällt nix auf was das verursachen könnte. Als gyro habe ich ein GY-521 drin, scheint auch zu laufen. Der IMU- und Odotest laufen auch. Ich hoffe das ihr vielleicht noch einen Ansatz habt woran das liegen könnte.
Ich sage schon mal danke für eure Unterstützung.
Gruß Frank
ich habe ein Problem mit meinem Mower, bzw. vorrangig mit der Odometrie. Gleich vorneweg, der Mower war noch nie im Dauereinsatz, immer nur Testfahrten. Konnte noch nie einen Stand erreichen der richtig lauffähig war. Zur Zeit habe ich die azuritber Firmware drauf, mit der habe ich "nur Odometrie Fehler".
Im Wiki steht was das man mindestens 400 Impulse pro Umdrehung haben sollte, soviele bekomme ich leider nicht hin. Bei mir sind das nur ca. 212/Umd.
Ich habe Motoren aus dem Shop, dürften wohl noch von den ersten sein. Schwarze Kappe mit Kabelschwanz, die workourounds mit dem entstören hatte ich damals auch gleich gemacht. Habe versucht so gut wie ich konnte die Vorgehensweise im Wiki zu der Firmware umzusetzen, doch leider klemmt da immer noch was. Wenn ich den Mower im Automodus starte fährt er einen guten halben Meter vor und bleibt dann stehen. Danach eine 90 Grad Drehung, das gleiche dann wieder. Nach der zweiten oder dritten Drehung geht er dann in den Spiralmodus, dann kommt kurz darauf der eigentliche Fehler, Odo Motor rechts.
Das ist bei jedem Start ein sehr ähnliches Verhalten, so ganz sicher wo ich ansetzen soll bin ich nicht. Verkabelung, Stecker, Kabelverlegung habe ich mehrfach nachgesehen, mir fällt nix auf was das verursachen könnte. Als gyro habe ich ein GY-521 drin, scheint auch zu laufen. Der IMU- und Odotest laufen auch. Ich hoffe das ihr vielleicht noch einen Ansatz habt woran das liegen könnte.
Ich sage schon mal danke für eure Unterstützung.
Gruß Frank