Hallo,
vor ein paar Tagen hab ich die Firmware nochmal neu aufgespielt und die Factory settings eingelesen. Seit dem funktioniert das Einfädeln auf die Perimeterschleife nicht mehr richtig.
Er fährt ja langsam solange gerade aus bis er an die Schleife kommt. Bisher hat er dann bei erreichen der Schleife angehalten, auf der Stelle gedreht und hat dann die Schleife verfolgt.
Seit neuestem fährt er jetzt nach dem erreichend er Schleife einen Bogen und stößt dann daraufhin gegen den Zaun oder was halt sonst da ist.
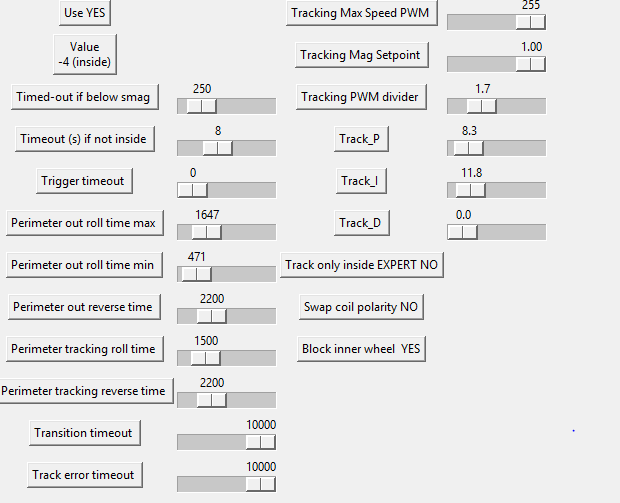
Ist dieses Verhalten über die Parameter steuerbar? Wie gesagt das lief bisher total problemlos.
Als Firmware verwende ich den sheep sheep branch.
Gruss Michael
vor ein paar Tagen hab ich die Firmware nochmal neu aufgespielt und die Factory settings eingelesen. Seit dem funktioniert das Einfädeln auf die Perimeterschleife nicht mehr richtig.
Er fährt ja langsam solange gerade aus bis er an die Schleife kommt. Bisher hat er dann bei erreichen der Schleife angehalten, auf der Stelle gedreht und hat dann die Schleife verfolgt.
Seit neuestem fährt er jetzt nach dem erreichend er Schleife einen Bogen und stößt dann daraufhin gegen den Zaun oder was halt sonst da ist.
Ist dieses Verhalten über die Parameter steuerbar? Wie gesagt das lief bisher total problemlos.
Als Firmware verwende ich den sheep sheep branch.
Gruss Michael
{kind=link}