Hi All
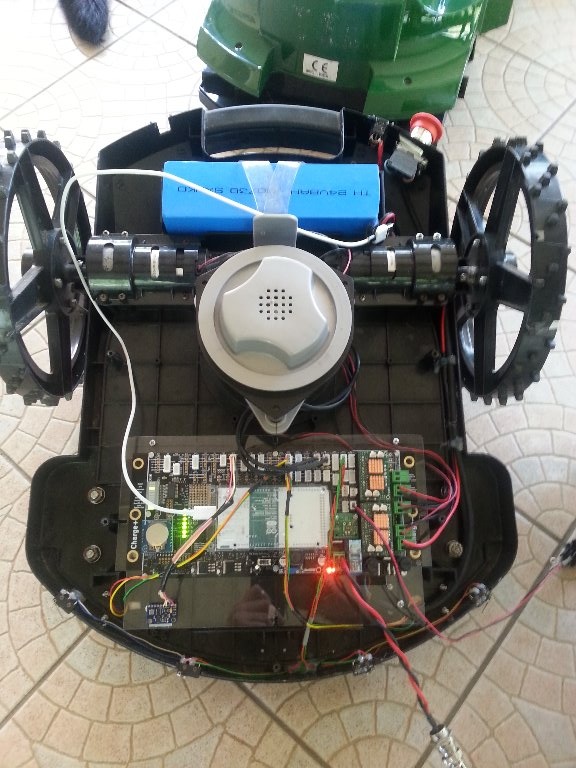
Here my new mower based on old paranello chassis.
PCB 1.3, Arduino Due,Paranello Odometry 1040 Ticks per rev,Rtc with eeprom
The PCB1.3 fits perfectly inside.
Below are photos and videos of the result.
Videos
https://youtu.be/qgA63Xb2LRE
and
https://youtu.be/8k0R5BnxNcE
Into this video the battery mower was low at 5min35 and the Peri find and track starts but with the left coil (npt center) and the result is Strange.
The code is based on Azurit 1.07 but with enormous modification to make mowing work by lane and full odometry control.
I put copper scotch in the inside of the cover to improve the functioning of the IMU but it did not help a lot so i need a lot of parameter to make the by lane working.
Little Description of the by lane.
3 mains direction from north 45 90 and 135 Deg with automatic switch when in corner
For each 3 directions 2 new direction for the opposite (one if the rotate is right the other if left) to avoid same lane mowing during 1 hour.
In a perfect word it will be -135 -90 -45 but as IMU is not enough accurate i need to add these value and not simply rotate 180 Deg.
A lot other param like distance between lane or maximum lane lenght to help the process work correctly.
For the moment i test but the result is better than i expect at the beginning.
My main problem is to be sure that the IMU is stable, if i set -82 Deg as the opposite of 90 Deg the result is the same after and after weeks.
By.
Here my new mower based on old paranello chassis.
PCB 1.3, Arduino Due,Paranello Odometry 1040 Ticks per rev,Rtc with eeprom
The PCB1.3 fits perfectly inside.
Below are photos and videos of the result.
Videos
https://youtu.be/qgA63Xb2LRE
and
https://youtu.be/8k0R5BnxNcE
Into this video the battery mower was low at 5min35 and the Peri find and track starts but with the left coil (npt center) and the result is Strange.
The code is based on Azurit 1.07 but with enormous modification to make mowing work by lane and full odometry control.
I put copper scotch in the inside of the cover to improve the functioning of the IMU but it did not help a lot so i need a lot of parameter to make the by lane working.
Little Description of the by lane.
3 mains direction from north 45 90 and 135 Deg with automatic switch when in corner
For each 3 directions 2 new direction for the opposite (one if the rotate is right the other if left) to avoid same lane mowing during 1 hour.
In a perfect word it will be -135 -90 -45 but as IMU is not enough accurate i need to add these value and not simply rotate 180 Deg.
A lot other param like distance between lane or maximum lane lenght to help the process work correctly.
For the moment i test but the result is better than i expect at the beginning.
My main problem is to be sure that the IMU is stable, if i set -82 Deg as the opposite of 90 Deg the result is the same after and after weeks.
By.