Der mechanische Aufbau der Robot-Plattform, speziell für Rasen Roboter, kann auf der Basis von 2 Grundideen erfolgen:
1. eigenes Chassis konstruieren
2. ein käufliches, leeres oder teilw. bestücktes (evt. defektes) Chassis, eines RasenRoboter aus dem Handel zu kaufen
Die Lösung unter 1. wird hier beschrieben.
Die 2. Lösung ist auch ein guter Weg, man hat jedoch keine bzw. nur wenige Möglichkeiten eigene Ideen zu verwirklichen.
Die eigene Konstruktion muss zunächst auf einen relativ einfache, mech. stabile Konstruktion aufbauen. Die größten Probleme bei der eigenen Konstruktion sind die Antriebe der Räder und des Mäh-Messers. Die Konstruktion dieser Mechanik ist eine Herausforderung dieses Problem mit "handelüblichen" und preiswerten Antriebsteile zu lösen.
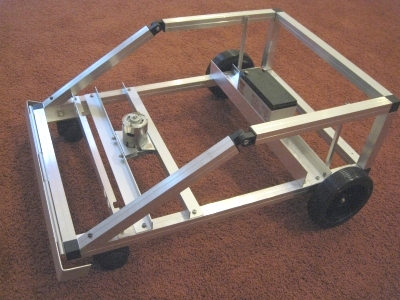
Die Mechanik des hier vorgestellt Prototyp ist einfach aufzubauen und enorm stabil.
Der Einbau der Sensoren, Antriebe und der Elektrik /Elektronik erfolgt mit Alu-Profil (Winkel , U-Profile) und erlaubt leicht Änderungen durchzuführen.
Die PDF zeigt den Aufbau der Mechanik:

Verbesserungen und Änderungen werde ich hier anhängen.
1. eigenes Chassis konstruieren
2. ein käufliches, leeres oder teilw. bestücktes (evt. defektes) Chassis, eines RasenRoboter aus dem Handel zu kaufen
Die Lösung unter 1. wird hier beschrieben.
Die 2. Lösung ist auch ein guter Weg, man hat jedoch keine bzw. nur wenige Möglichkeiten eigene Ideen zu verwirklichen.
Die eigene Konstruktion muss zunächst auf einen relativ einfache, mech. stabile Konstruktion aufbauen. Die größten Probleme bei der eigenen Konstruktion sind die Antriebe der Räder und des Mäh-Messers. Die Konstruktion dieser Mechanik ist eine Herausforderung dieses Problem mit "handelüblichen" und preiswerten Antriebsteile zu lösen.
Die Mechanik des hier vorgestellt Prototyp ist einfach aufzubauen und enorm stabil.
Der Einbau der Sensoren, Antriebe und der Elektrik /Elektronik erfolgt mit Alu-Profil (Winkel , U-Profile) und erlaubt leicht Änderungen durchzuführen.
Die PDF zeigt den Aufbau der Mechanik:
Verbesserungen und Änderungen werde ich hier anhängen.