mbatorowicz
Member
Hello, after charging the battery I click on "auto mode" and the mower goes back a moment and "perimeter error" appears. What can be improved to make the departure from the charging station correct?


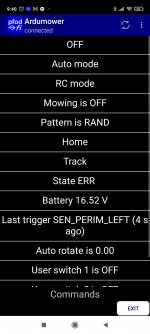
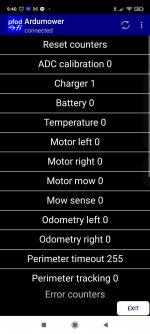

Compliments on the charging station! Looks greatI have the settings as in the pictures. Nevertheless, the mower reverses 10 cm and stops and errors appear as in the pictures. I don't know what can be wrongly set anymore. The descriptions in the application are completely unclear to me. It is not known which setting is responsible for what. There should be some description for the settings.




yes, in random mode the lines are straight.This is how my mower moves with the settings shown in the picture.
Anhang anzeigen 2643
Anhang anzeigen 2644
Is it possible for the mower in RAND mode to mow like in Azurit - straight lines?

Click on List Var before saving console ---> normaly all the setting var are listed with small pause each 10 or 15 valueInto console click on list var and Save to file.
//#define Console Serial
//#define CONSOLE_BAUDRATE 115200 // baudrate used for PC
#define Console SerialUSB
#define CONSOLE_BAUDRATE 115200 // baudrate used for Raspberry PI console


