silas_michael@gmx_de
New member
Die Vorgeschichte
Vorgeschichte überspringen > Post 2 mit aktuellem Projektstatus!
(Einige werden schon den Beitrag unter Konstruktion gelesen haben, Hier Passt eine Chronik aber besser zum Thema)
Ich habe ca. 3 Jahre nicht mehr an meinem Rasenroboter gebaut, da ich einige (für mich) aufwendige Lösungen meiner Probleme gesucht habe. Als ich vor ca 7 Jahren angefangen habe, gab es dieses Projekt hier noch nicht. Auch andere Quellen, waren erst am Entstehen. Deshalb musste ich mir fast alles selbst erarbeiten (Induktionsschleife, Programm mit Bascom in C, Radantrieb mit haltbaren Motoren, ...). Im Roboternetz habe ich damals ein paar Informationen von anderen Roboter Projekten bekommen. Ich habe aber auch viele Fehler gemacht und viel Lehrgeld bezahlen müssen (das ich einen Automower kaufen könnte).
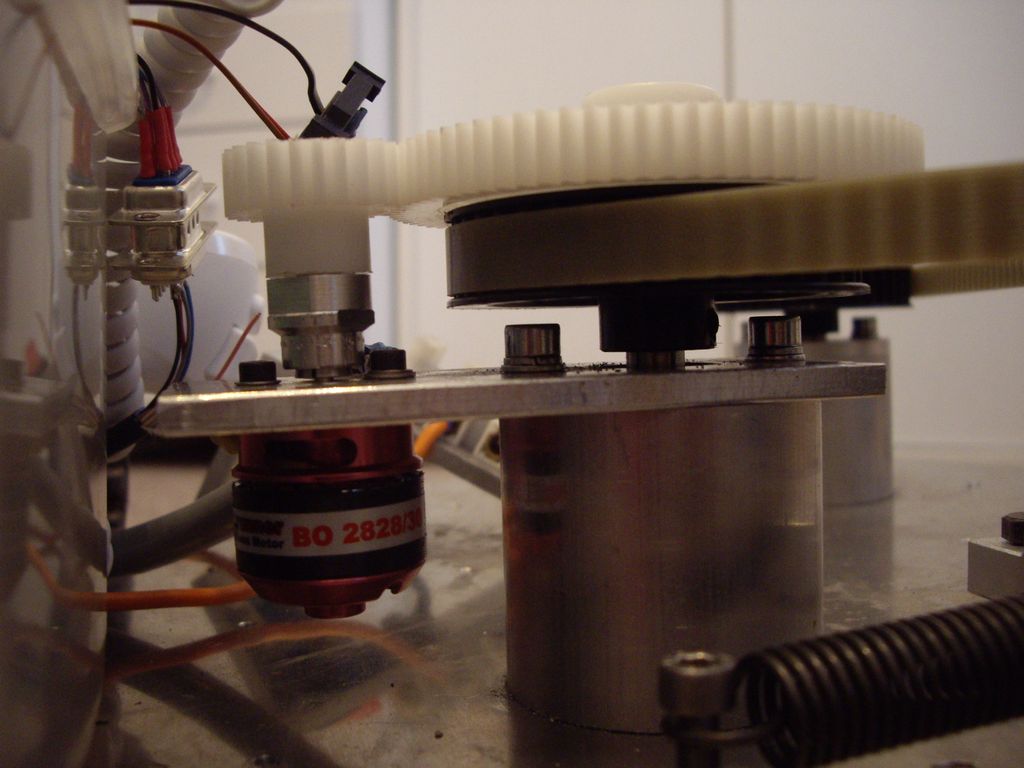
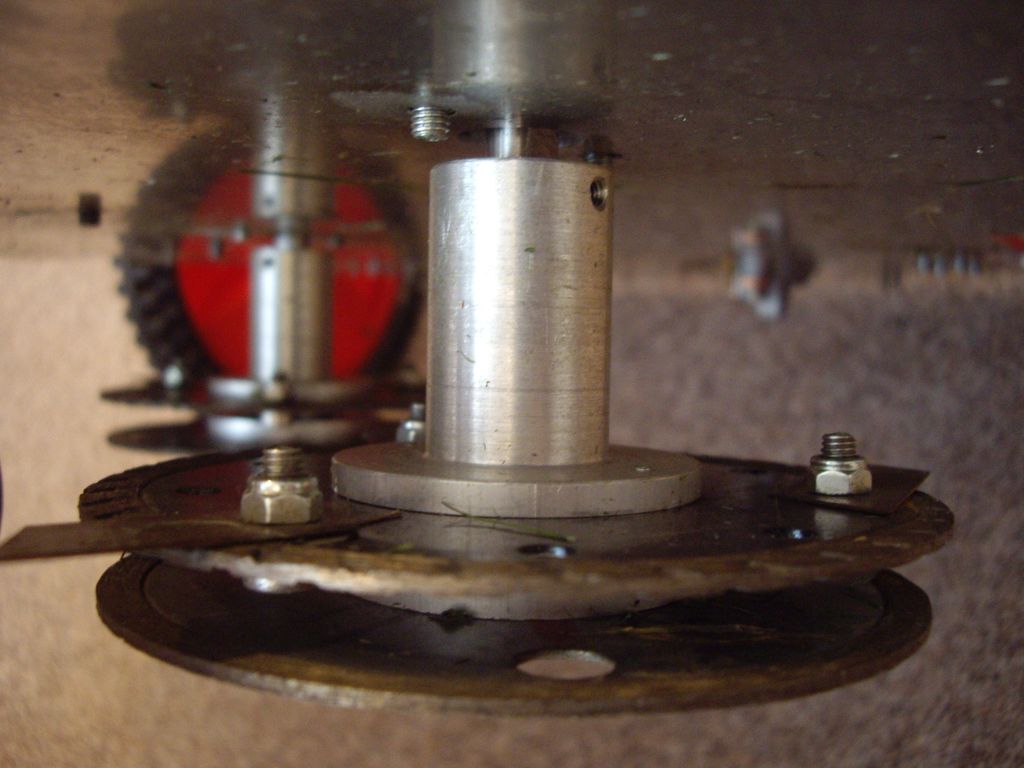
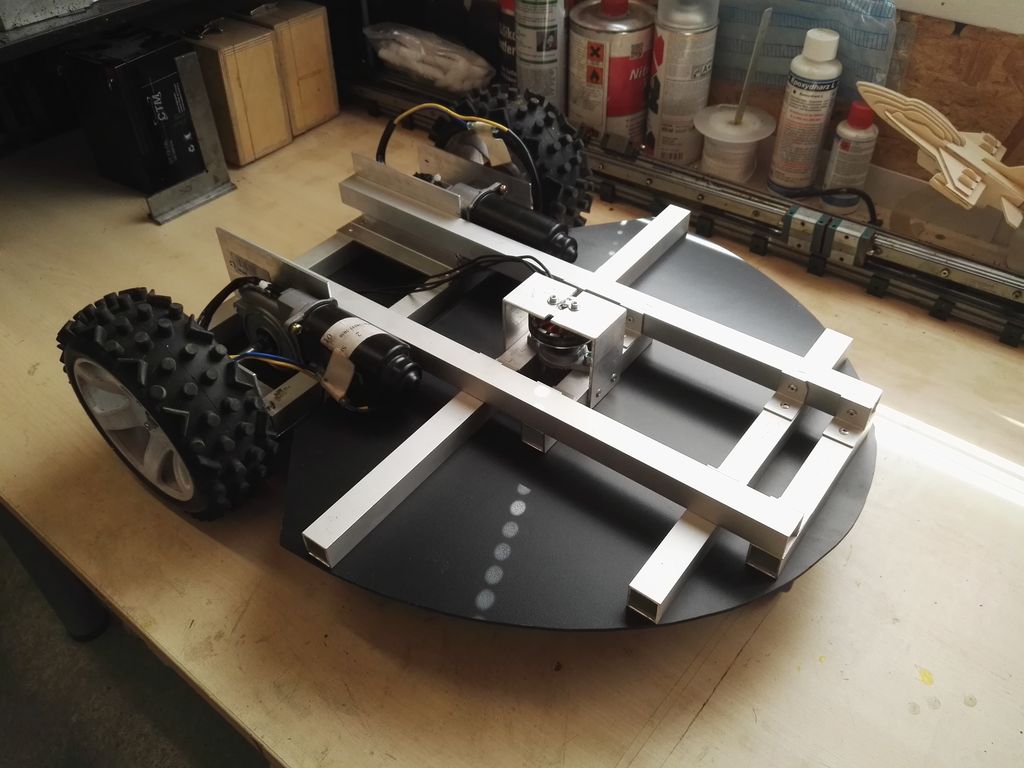
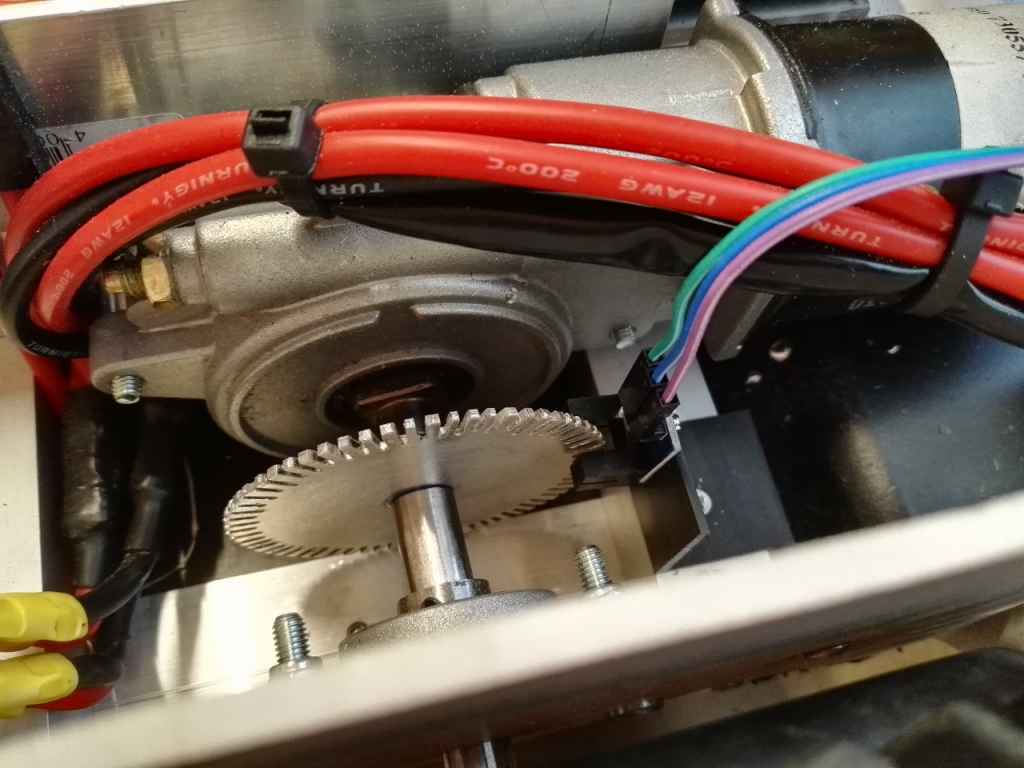
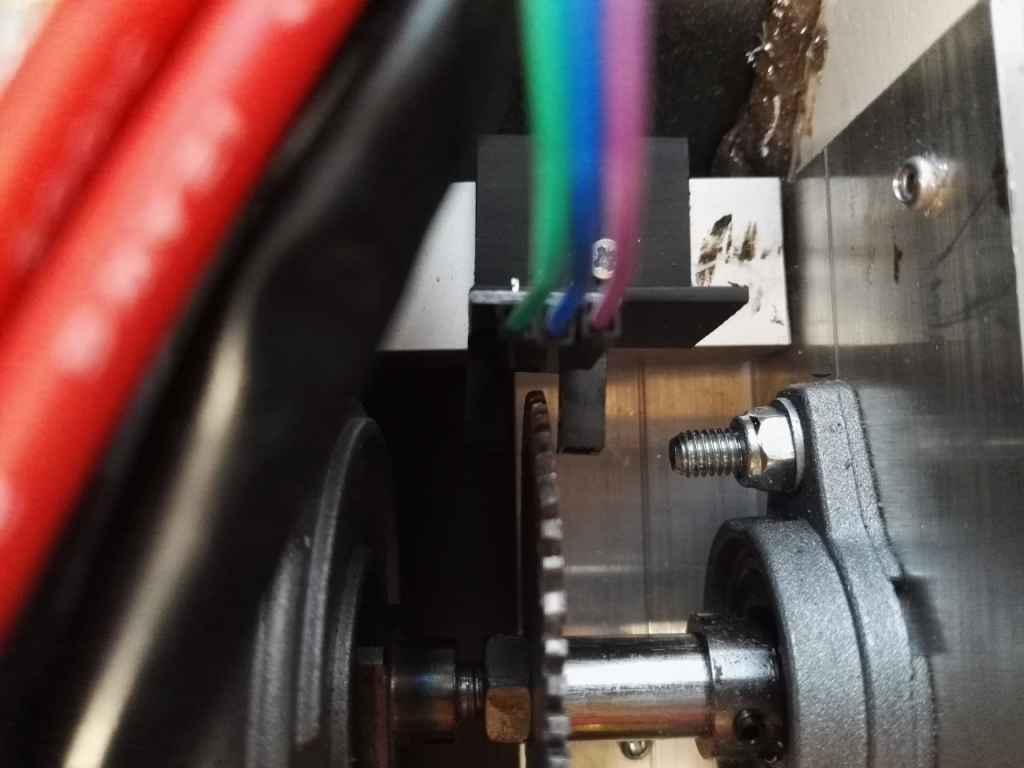
Ich habe immer wieder Kleinigkeiten geändert. Die größten Probleme hatte ich mit den Antriebsmotoren. Angefangen hab ich mit MFA 385er 148:1 (durchgebrant) später 540er Getriebemotoren (haben last nicht standgehalten – Getriebe gebrochen, durch Denso Schneckenradgetriebemotoren von Ebay ersetzt, wesentlich Leiser und Stärker). Mit den stärkeren Motoren sind dann ständig die Räder durchgedreht am Hang (18% Steigung). Deshalb hab ich dann Räder von einem 1:5 Modellauto genommen (16cm Durchmesser). Die Kombination aus Denso Motor und den Rädern ist perfekt!
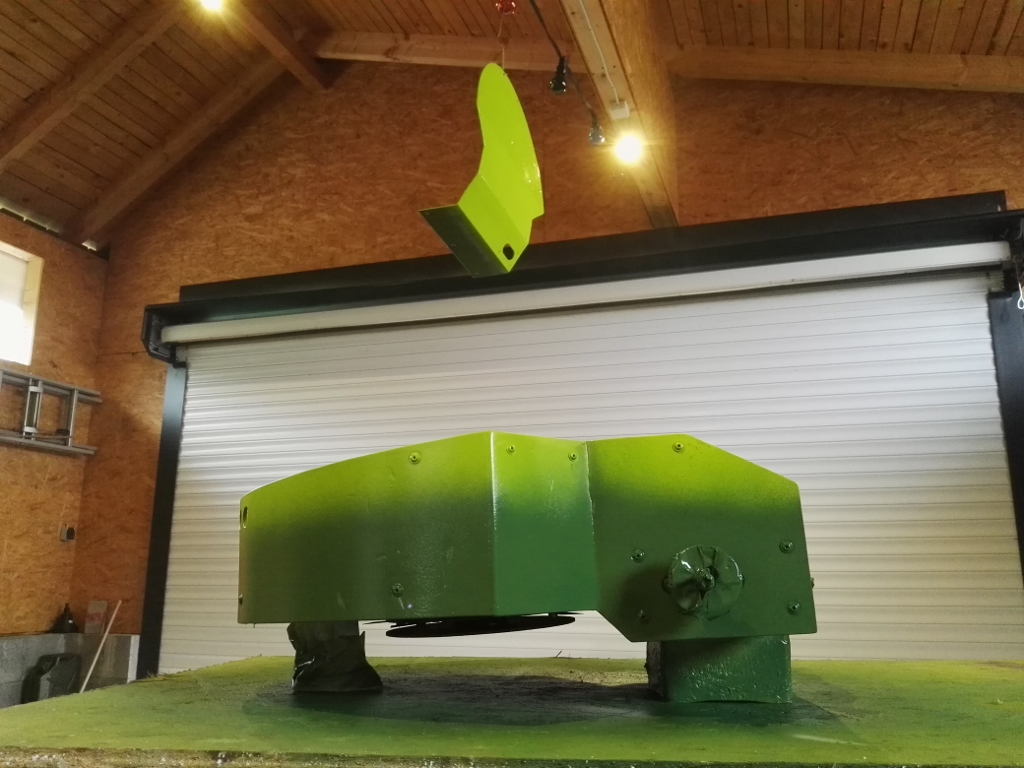
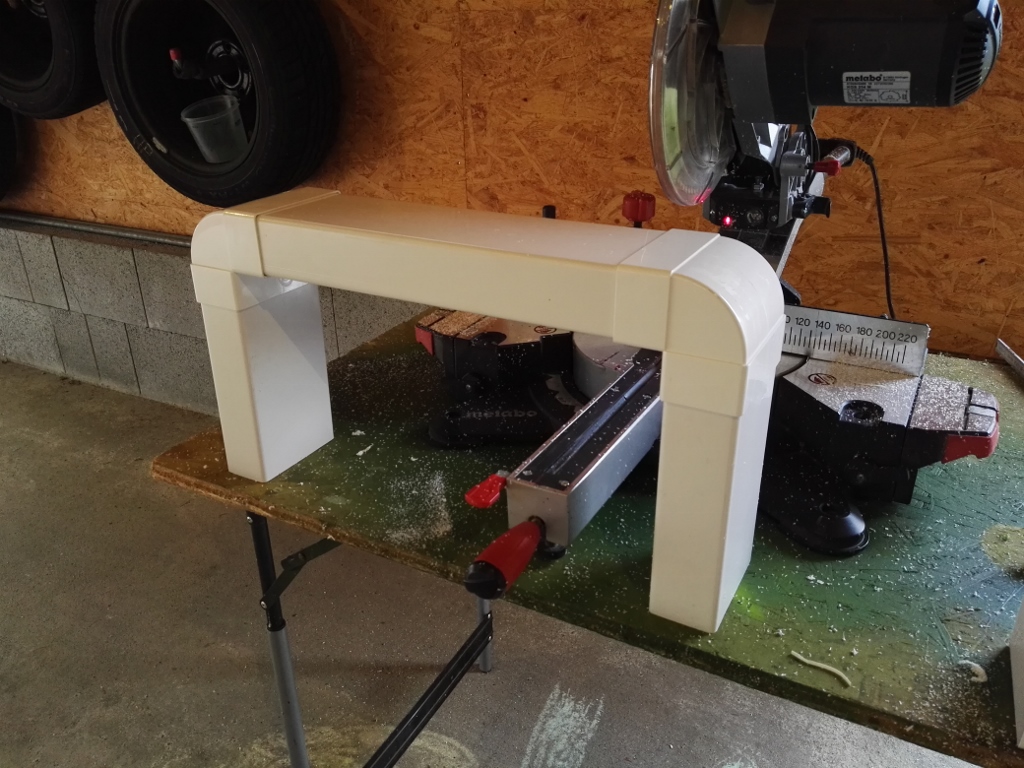
Ebenfalls hatte ich den Mäher auf einer Alu platte aufgebaut. Da hatte ich aber Probleme mit der Höhe der Schneide und den "kleinen" Rädern und dem Gewicht. Deshalb jetzt ein leichter, flexibler Rohrrahmen.
Mehr kann man, wen es interessiert, im RN-Forum nachlesen. Da hab ich alles Dokumentiert.
Hier mal eine Übersicht meiner Ardumower Vorgängerversionen
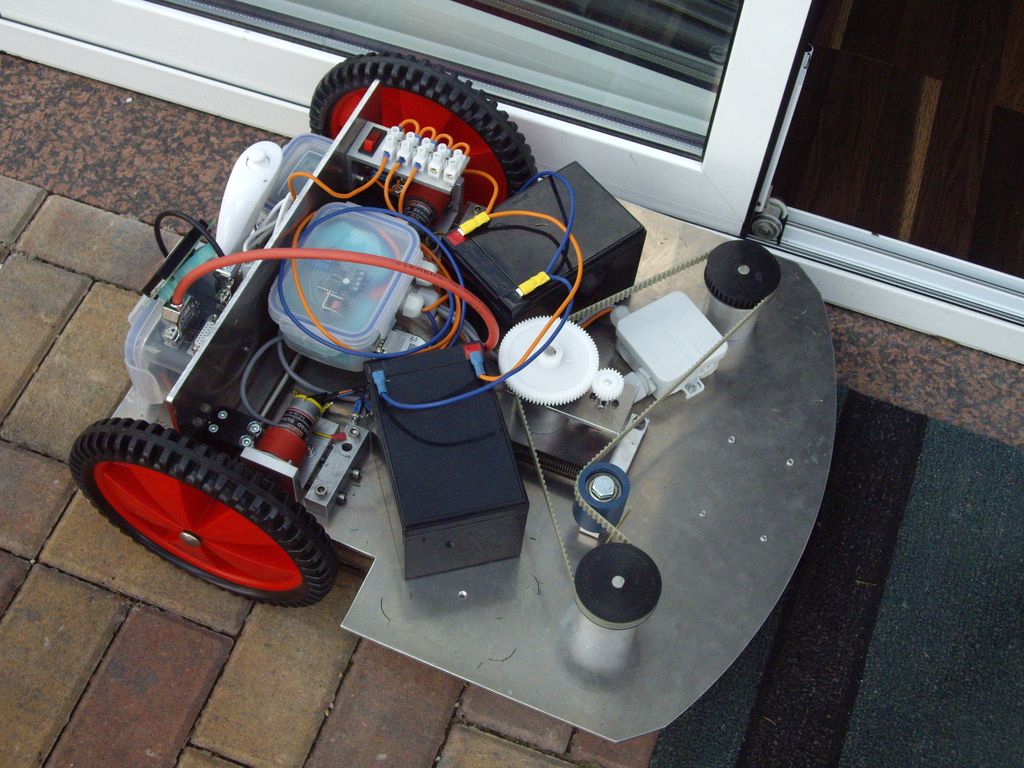
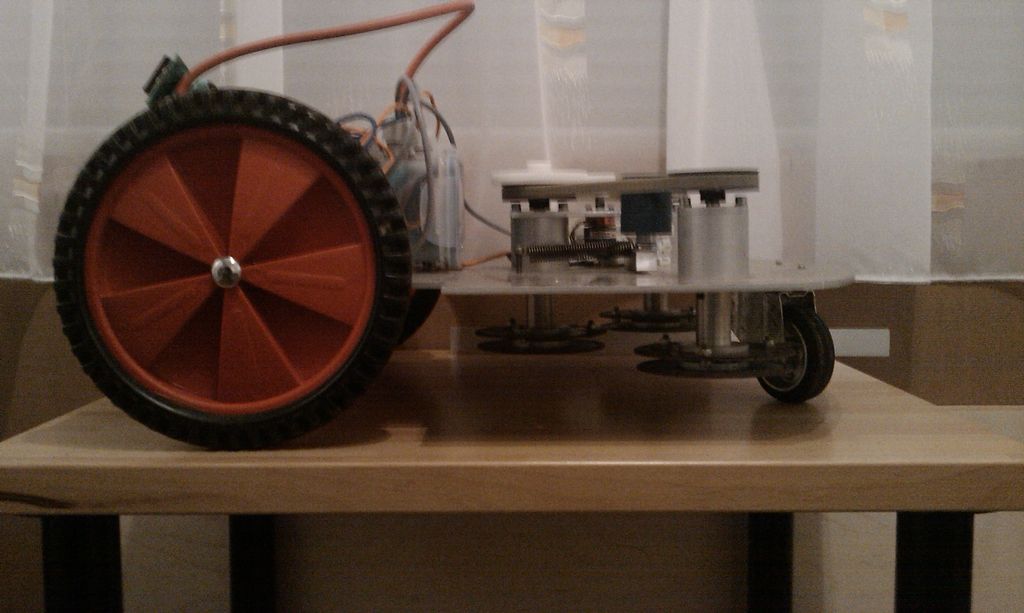
Version 1 (MFA 385er 148:1 Antriebsmotoren / 2 Bleiakkus)
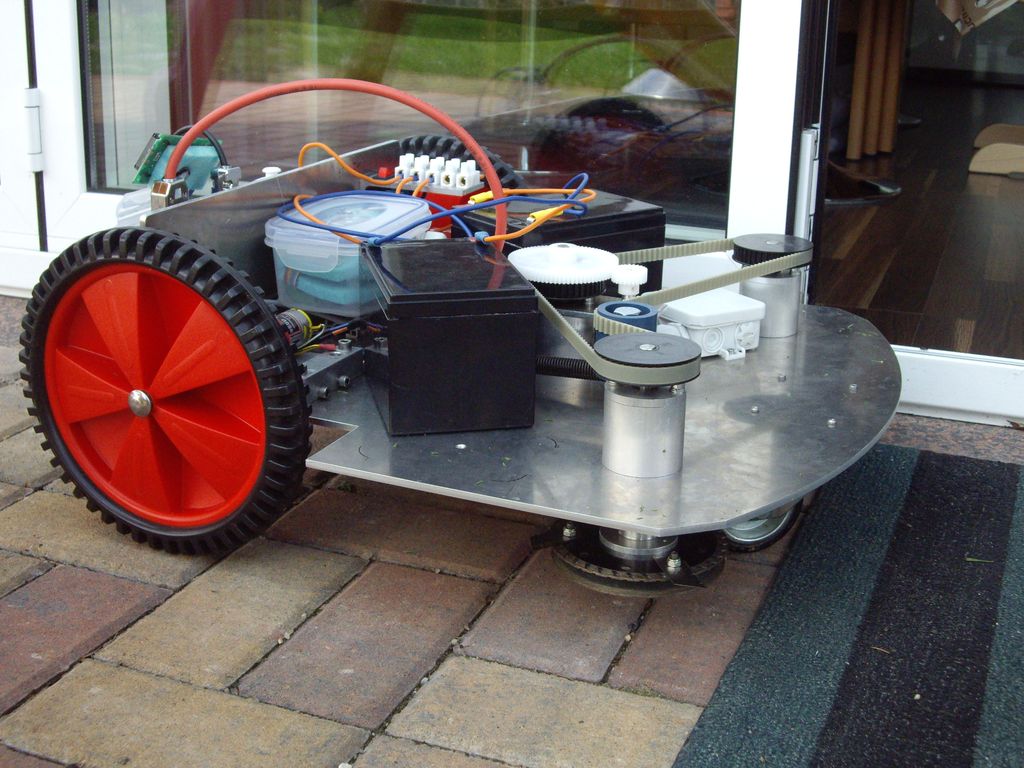
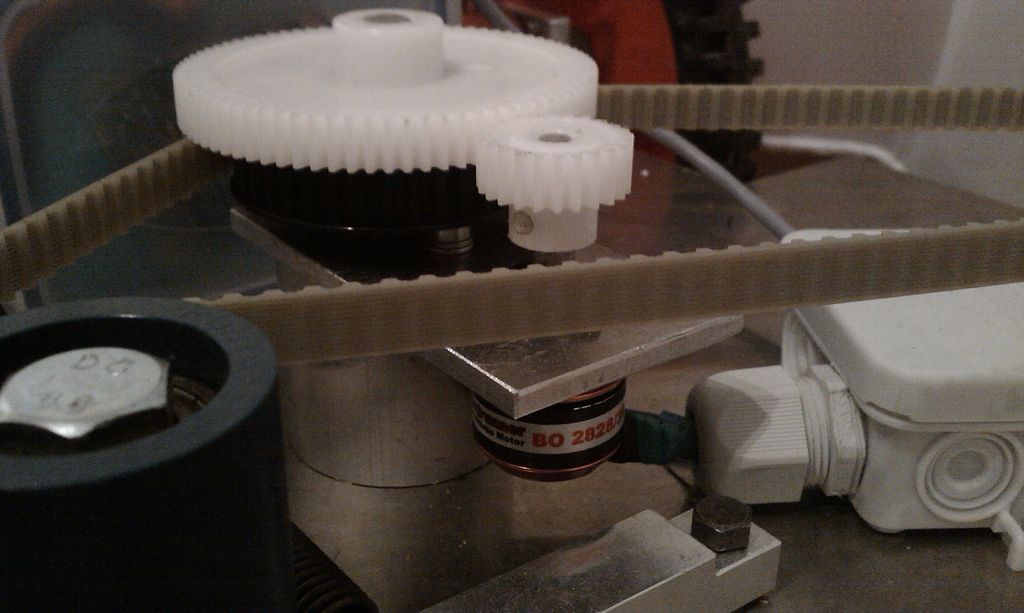
Version 2 (MFA 540er Antriebsmotoren / 1 Bleiakku)
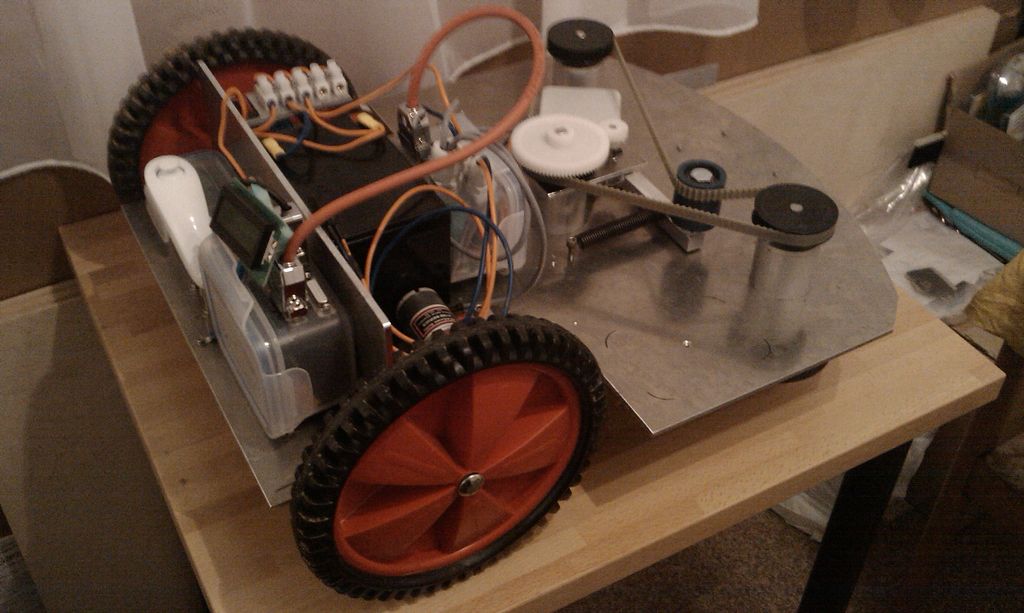

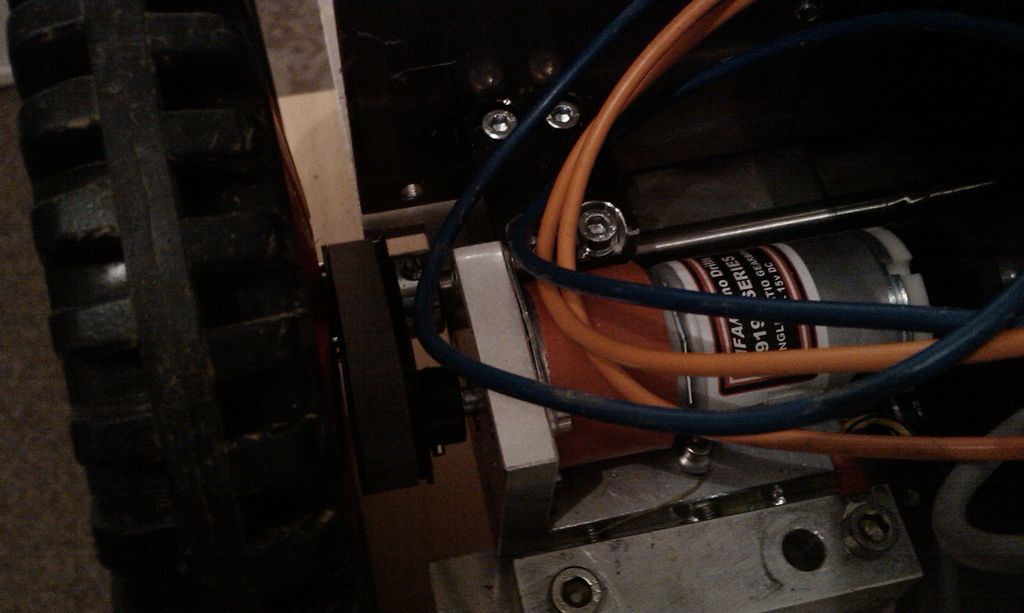
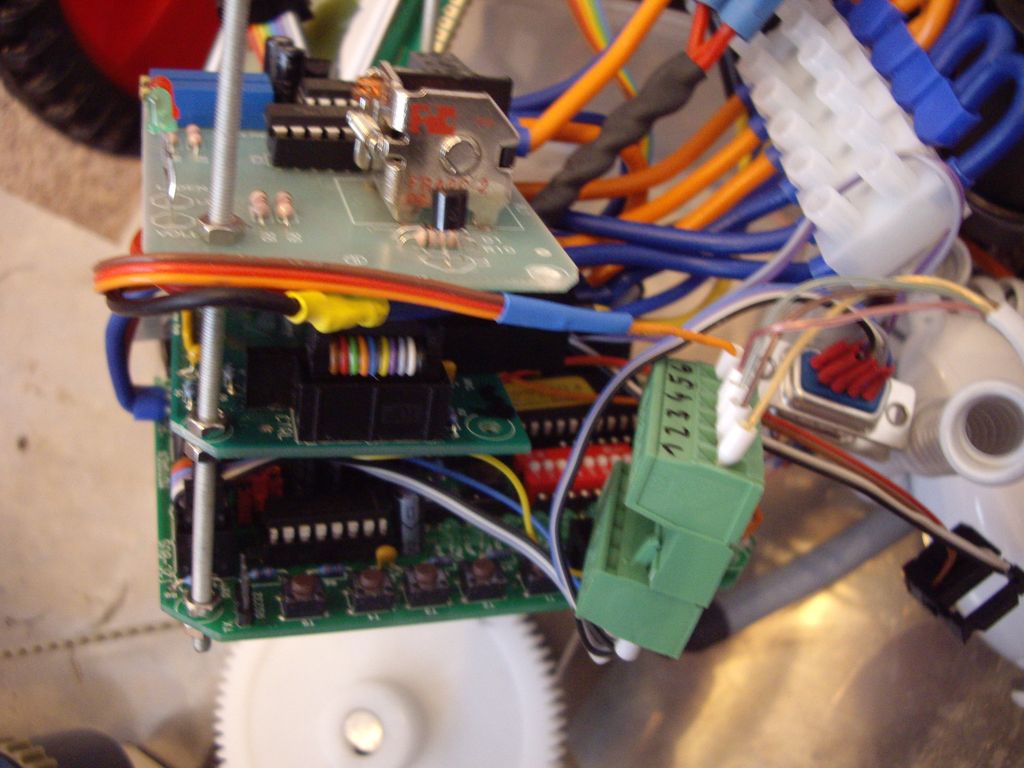
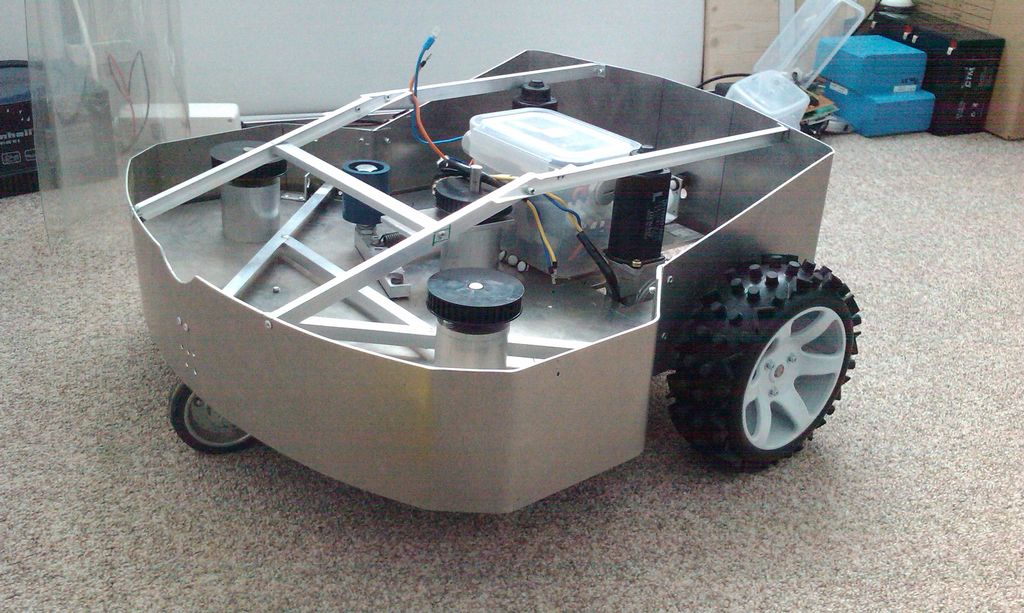
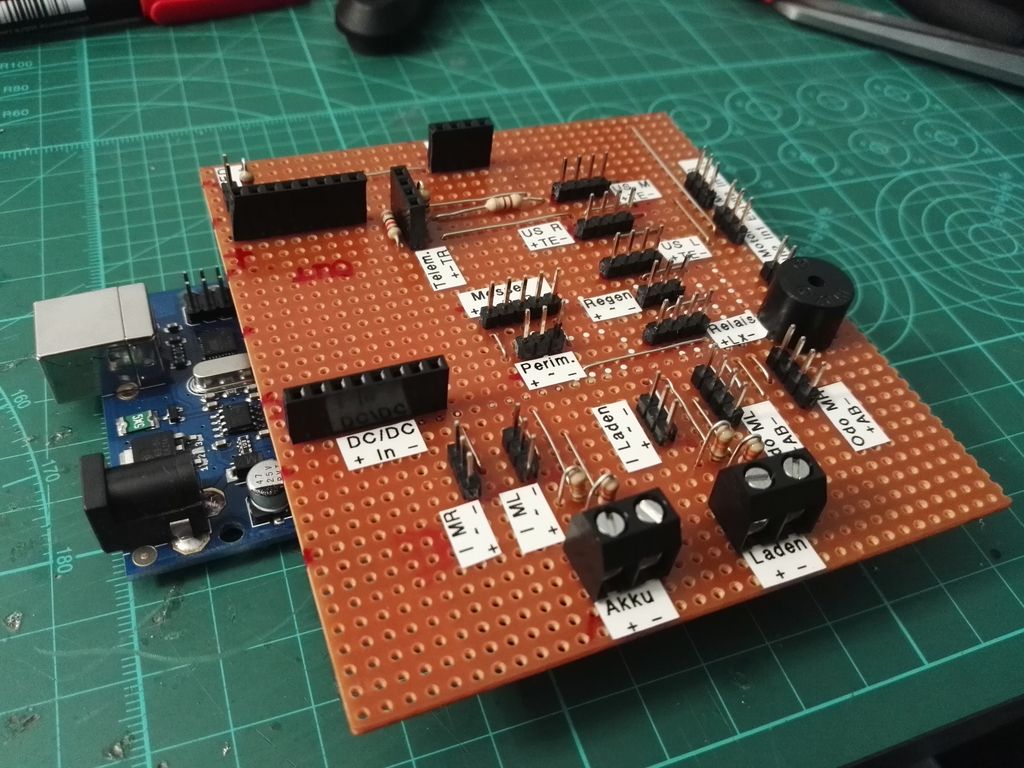
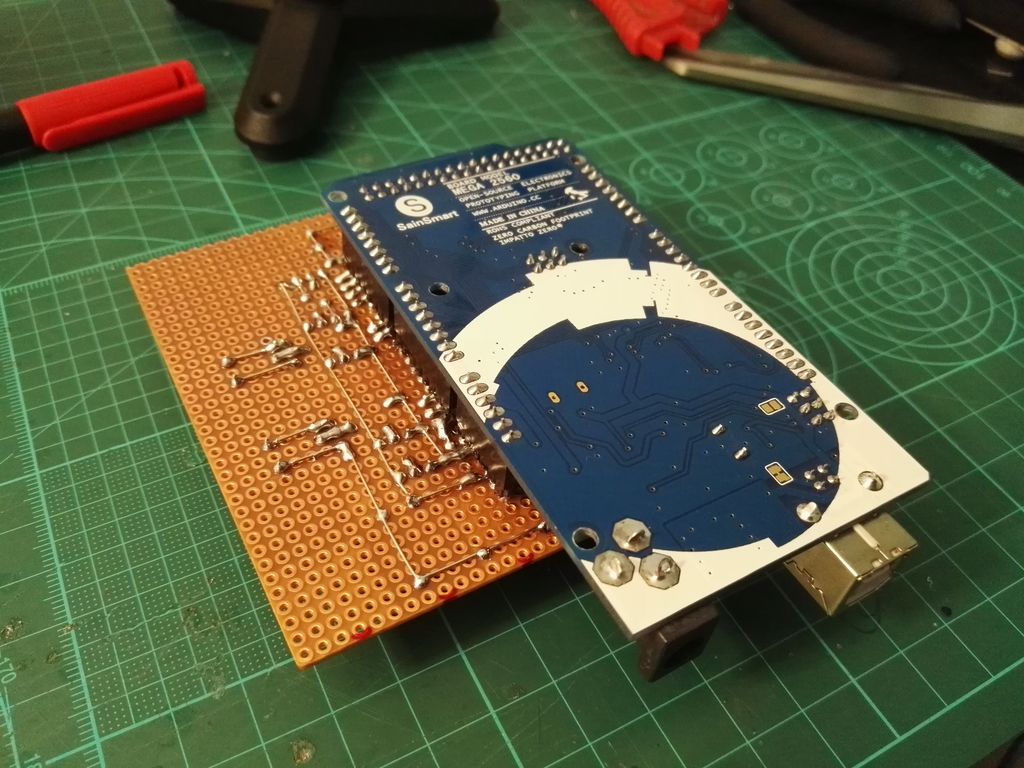
Version 3 (Denso Antriebsmotoren / Mähwerk leicht geändert / Elektronik verkleinert)
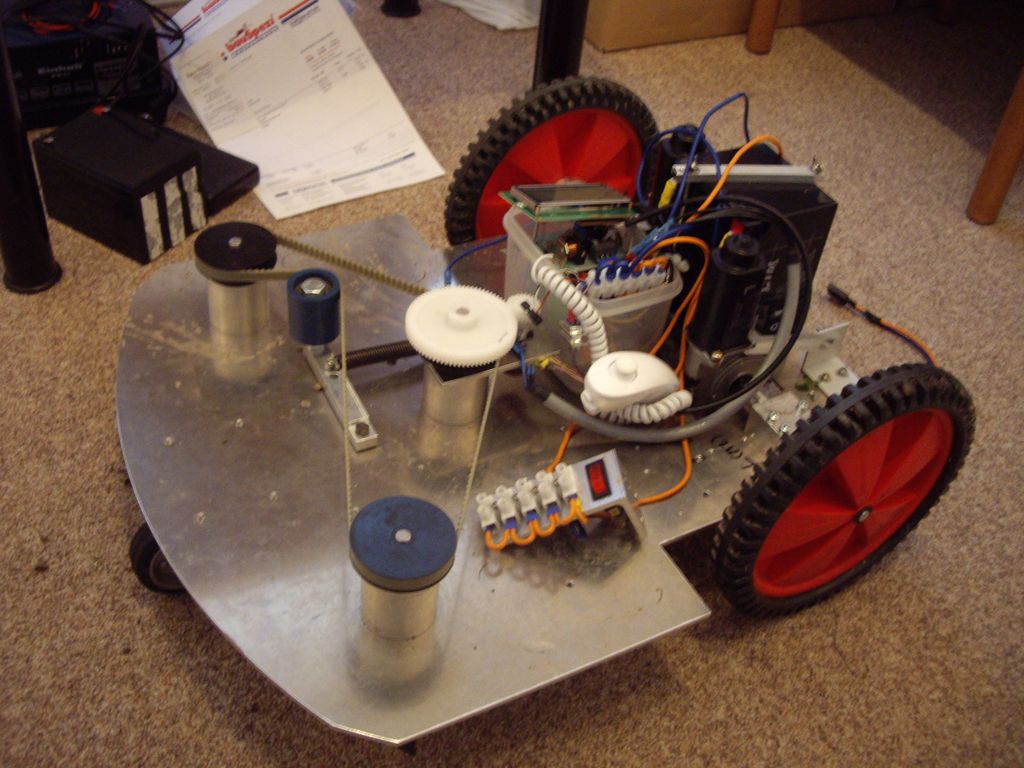

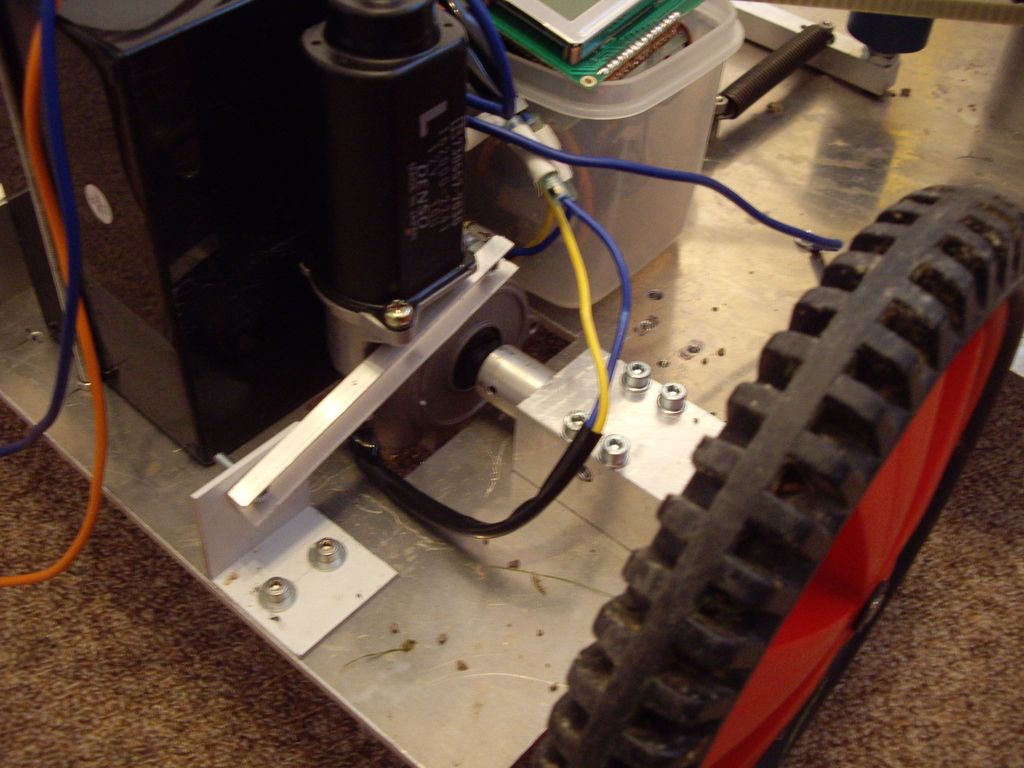
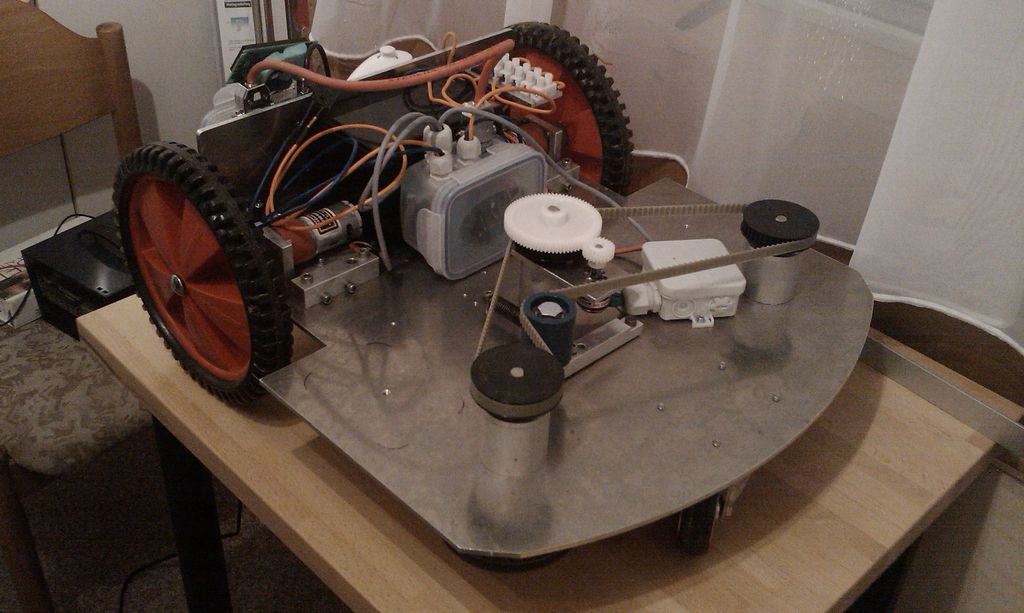
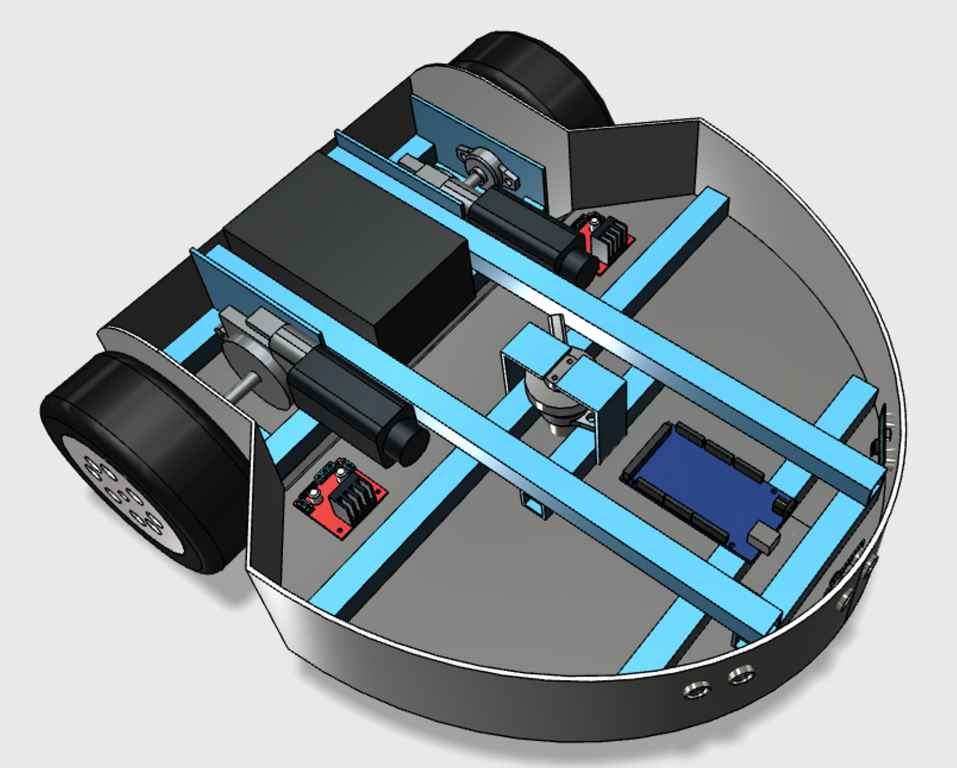
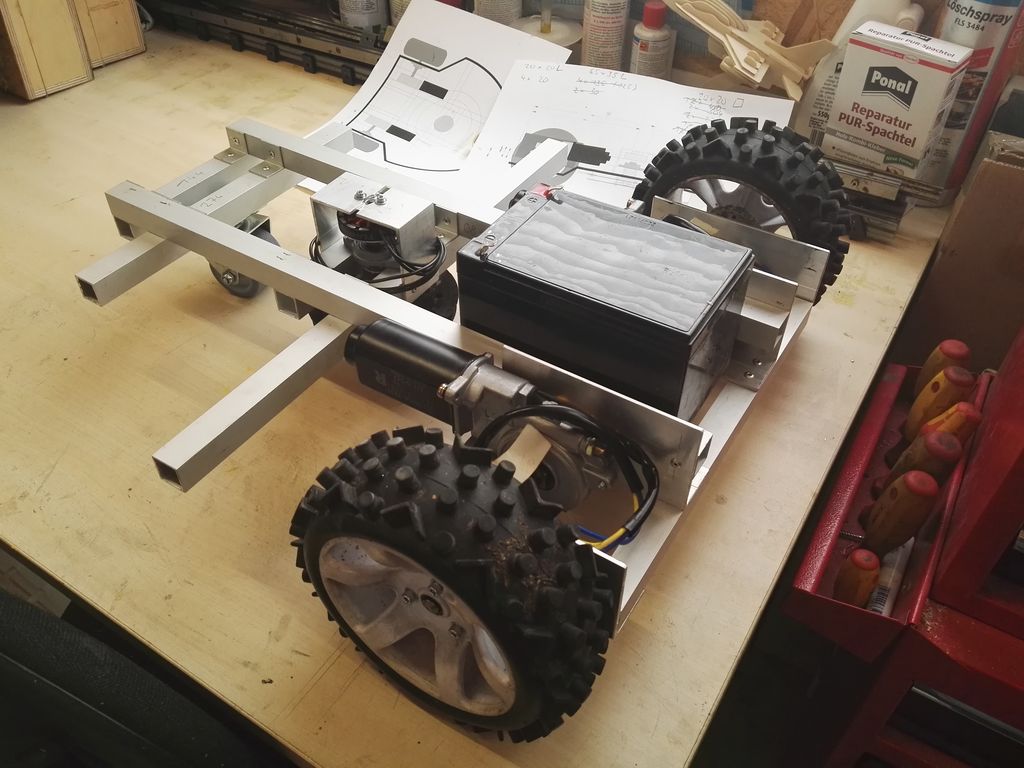
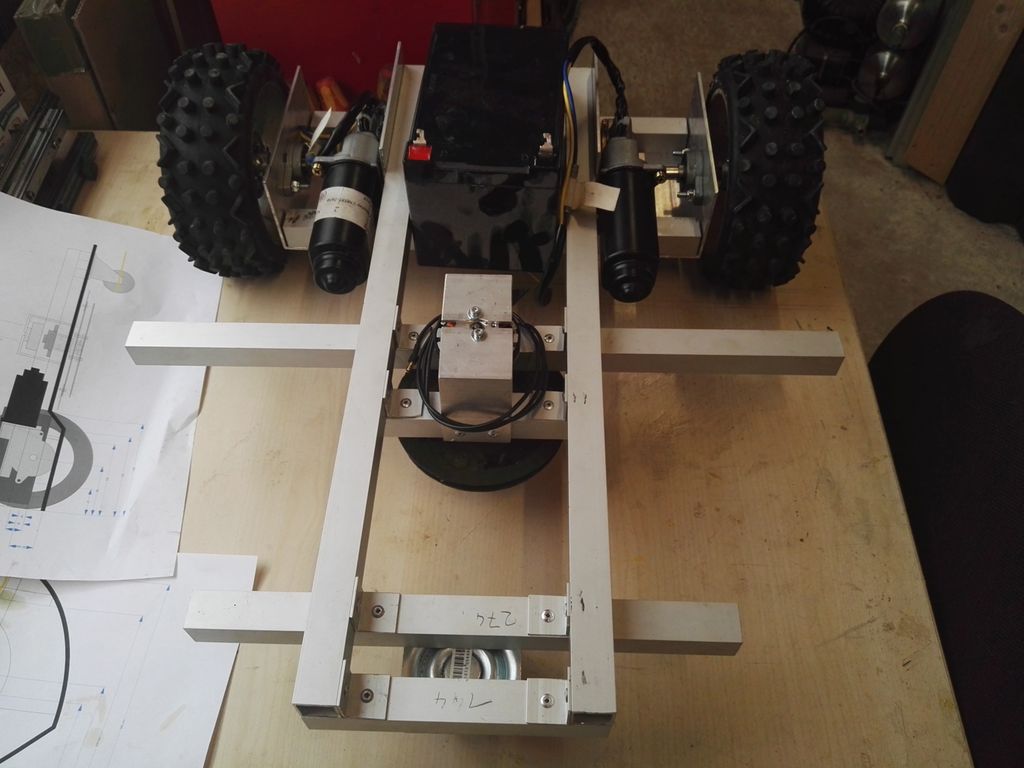
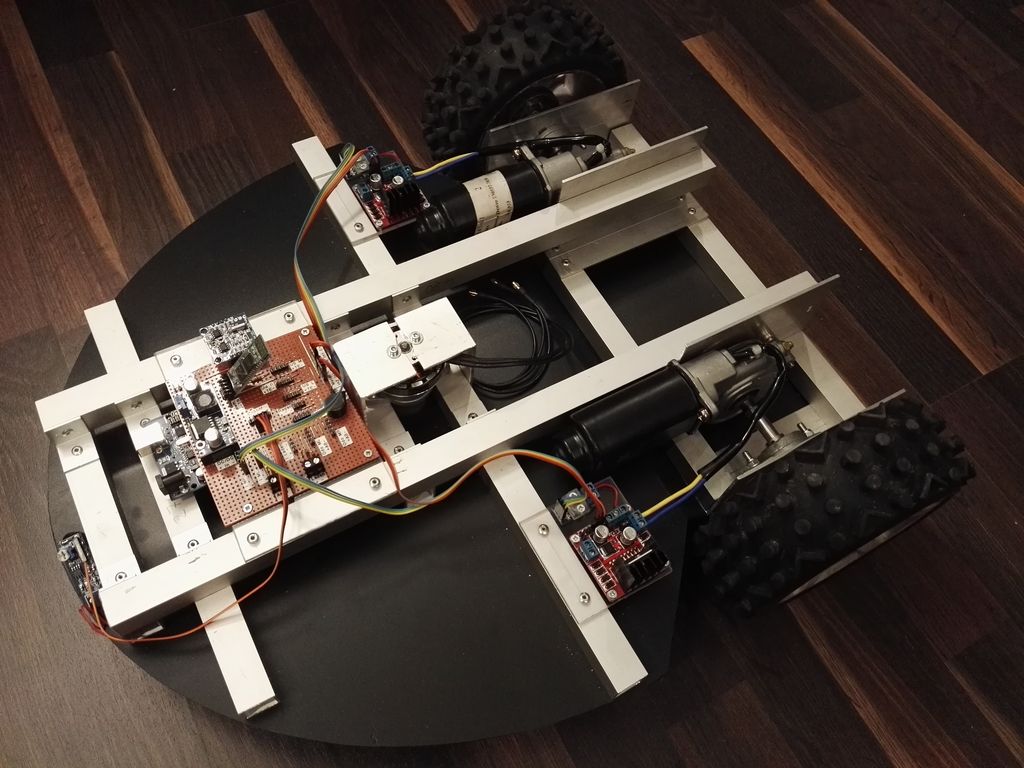
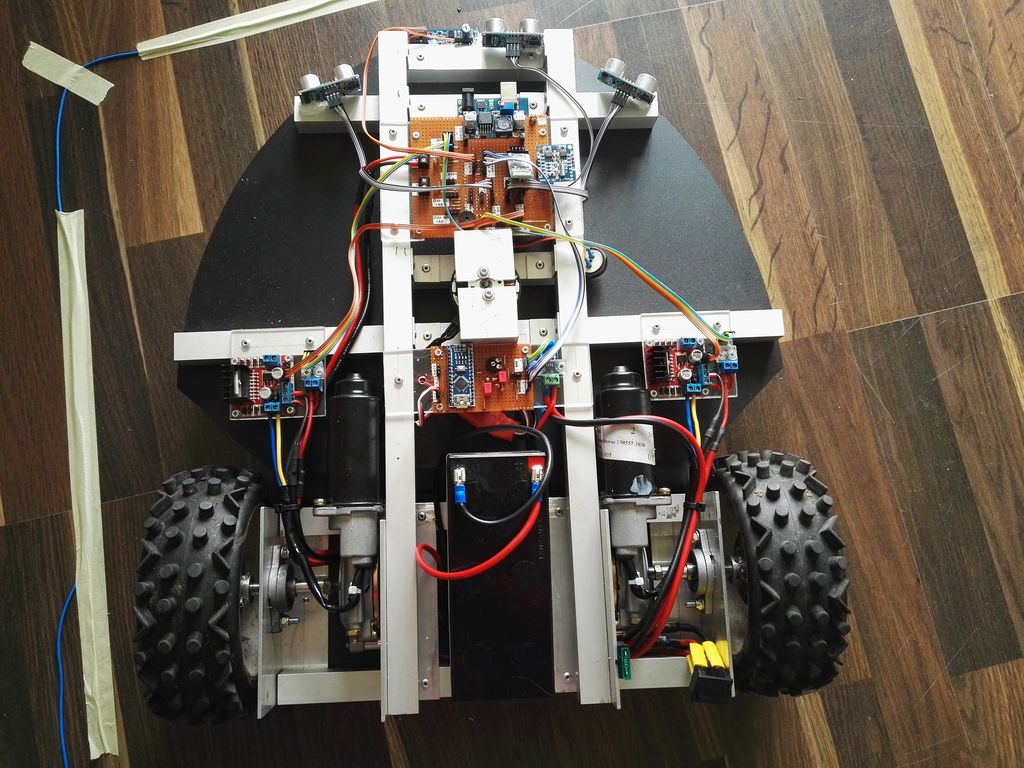
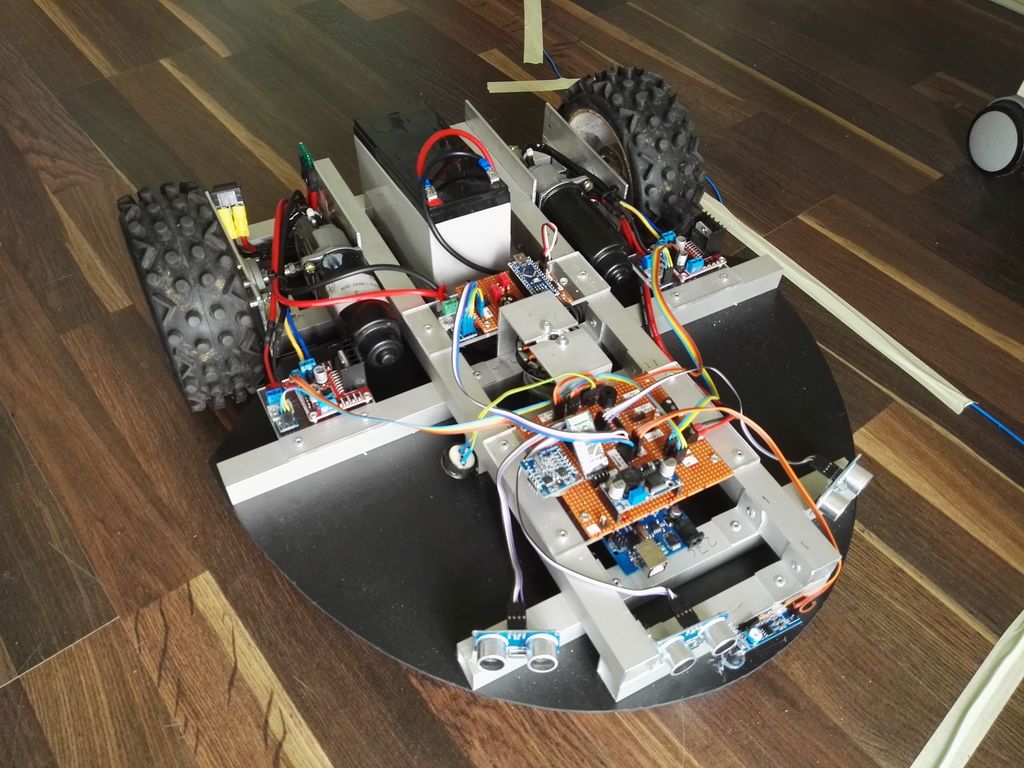
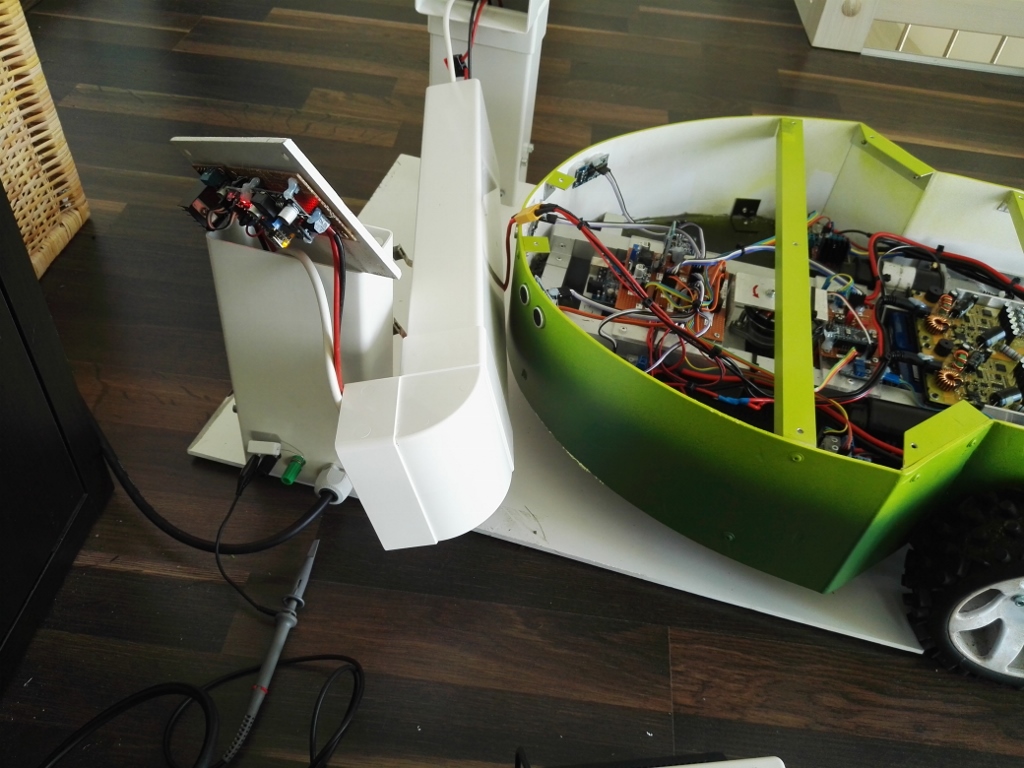
Version 4 (Aufbauten neu angeordnet / schwingendes Gehäuse mit Kollisionssensoren / LiPo-Akkus / stärkerer Mähmotor / 1:5 Modellbau Räder)


Vorgeschichte überspringen > Post 2 mit aktuellem Projektstatus!
(Einige werden schon den Beitrag unter Konstruktion gelesen haben, Hier Passt eine Chronik aber besser zum Thema)
Ich habe ca. 3 Jahre nicht mehr an meinem Rasenroboter gebaut, da ich einige (für mich) aufwendige Lösungen meiner Probleme gesucht habe. Als ich vor ca 7 Jahren angefangen habe, gab es dieses Projekt hier noch nicht. Auch andere Quellen, waren erst am Entstehen. Deshalb musste ich mir fast alles selbst erarbeiten (Induktionsschleife, Programm mit Bascom in C, Radantrieb mit haltbaren Motoren, ...). Im Roboternetz habe ich damals ein paar Informationen von anderen Roboter Projekten bekommen. Ich habe aber auch viele Fehler gemacht und viel Lehrgeld bezahlen müssen (das ich einen Automower kaufen könnte).
Ich habe immer wieder Kleinigkeiten geändert. Die größten Probleme hatte ich mit den Antriebsmotoren. Angefangen hab ich mit MFA 385er 148:1 (durchgebrant) später 540er Getriebemotoren (haben last nicht standgehalten – Getriebe gebrochen, durch Denso Schneckenradgetriebemotoren von Ebay ersetzt, wesentlich Leiser und Stärker). Mit den stärkeren Motoren sind dann ständig die Räder durchgedreht am Hang (18% Steigung). Deshalb hab ich dann Räder von einem 1:5 Modellauto genommen (16cm Durchmesser). Die Kombination aus Denso Motor und den Rädern ist perfekt!
Ebenfalls hatte ich den Mäher auf einer Alu platte aufgebaut. Da hatte ich aber Probleme mit der Höhe der Schneide und den "kleinen" Rädern und dem Gewicht. Deshalb jetzt ein leichter, flexibler Rohrrahmen.
Mehr kann man, wen es interessiert, im RN-Forum nachlesen. Da hab ich alles Dokumentiert.
Hier mal eine Übersicht meiner Ardumower Vorgängerversionen
Version 1 (MFA 385er 148:1 Antriebsmotoren / 2 Bleiakkus)
Version 2 (MFA 540er Antriebsmotoren / 1 Bleiakku)
Version 3 (Denso Antriebsmotoren / Mähwerk leicht geändert / Elektronik verkleinert)
Version 4 (Aufbauten neu angeordnet / schwingendes Gehäuse mit Kollisionssensoren / LiPo-Akkus / stärkerer Mähmotor / 1:5 Modellbau Räder)


















") Ist aber nicht das erste mal das das es verwechselt wird.
Ist aber nicht das erste mal das das es verwechselt wird. {kind=link}