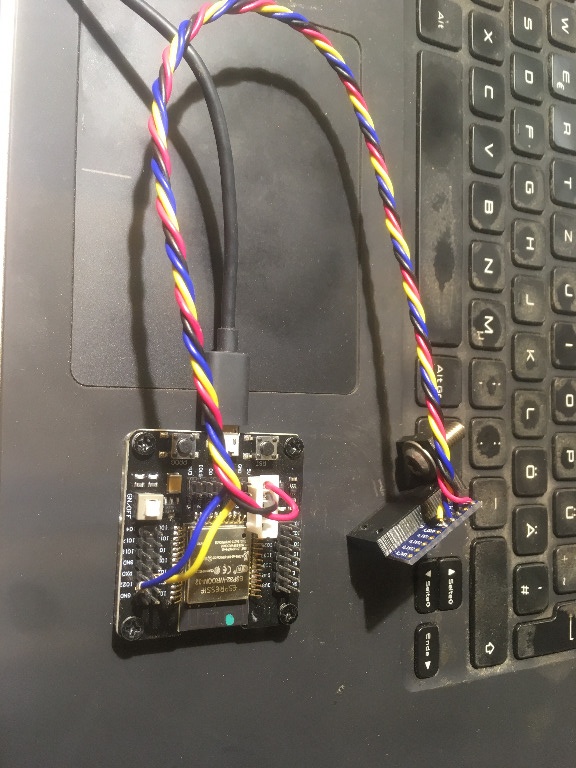
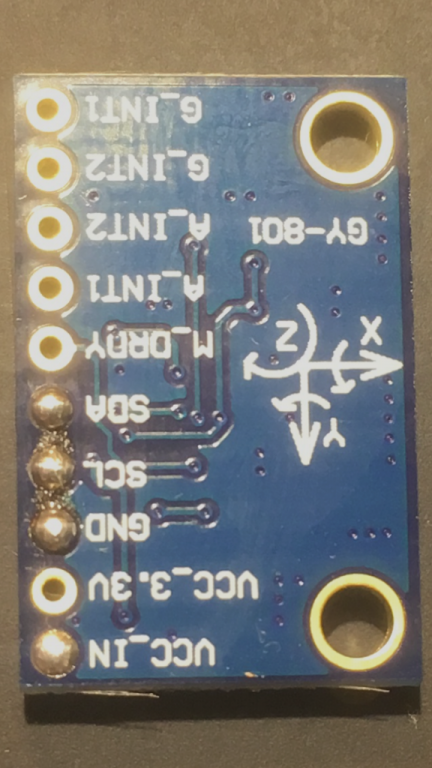
Hallo, erst mal vielen dank an alle Entwickler von diesem Projekt. Wirklich tolle Arbeit. Ich bin jetzt auch Besitzer eines Ardumowers und nach ein paar Anpassungen lauft das teil schon super. Perimeter, Ladestation, Sonar, Bumper funktioniert alles super. Was mich allerdings schon einige Zeit die nerven raubt ist die IMU. Den GY-801 hab ich bei Marotronics mit dem Ardumower zusammen bestellt und habe schon von Herr Lübon ein 2tes Modul zu gesendet bekommen. Vielen Dank an der stelle dafür. Leider beide Module den gleichen Fehler. Also entweder beide Kaputt oder was anderes faul. Komisch ist das mein IMU Problem eigentlich identisch zu dem Thread "Motoren laufen kurz bis zum Fehler" ist.
Das findet der I2C Scanner:
Das sagt der rs232:
Die Kalibrierung von dem Gyro funktioniert der liefert auch Daten. Die hole ich mir über den ESP alles super. Der Beschleunigungssensor geht auch. Was aber absolut nix ausspuckt ist der Kompass. Mit der 1.0a9-Azurit und der aktuellen DEV das gleiche. Bei der Kompass Kalibrierung ist der Buzzer auch stille wenn ich das richtig verstehe sollte der bei der Kalibrierung was von sich geben da kommt nix. Ich verstehe auch nicht warum der Kompass nicht im I2C Scanner auftaucht.
Über rs232 ist auch nen bug die Menü Einträge sind vertauscht (consoleui.h Zeile 108,109 und 289-295):
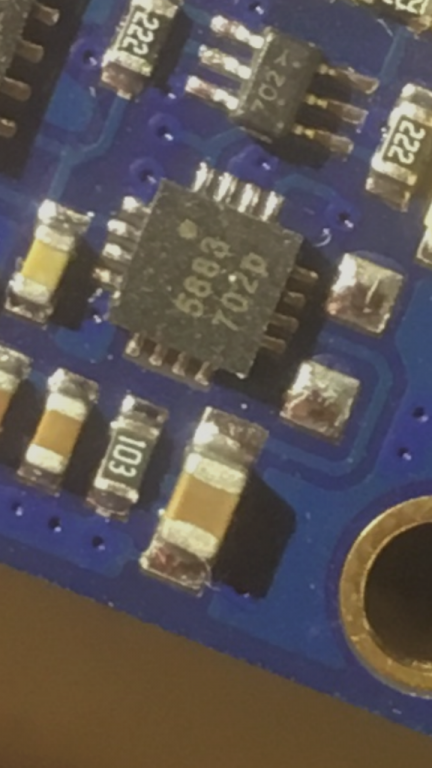
In der IMU.cpp steht auch was von GY-80 ist der von den I2C Adressen gleich mit dem GY-801?
Sollte der HMC5883L nicht mit der Adresse 1E im I2C Scanner auftauchen? Ich hab hier was von Passthrough gelesen aber welcher der Steine auf dem GY-801 macht da ein Passthrough? Laut Datenblatt hängt doch der HMC5883L direkt an I2C.
Ein RIGOL DS1054 steht hier auch rum Spannung sind alle IO. Allerdings hab ich von I2C und Gyros kein plan. In der Testapp ist der Kompass auch auskommentiert.
imuahrs
Da es sich Praktisch um den gleichen Code handelt wie in Azurit gleicher Fehler Gyro geht Kompass nix...
Evtl. hat ja einer noch ein paar Infos für mich.
VIELEN DANK
UND GANZ HERZLICHEN DANK AN DIE ENTWICKLER DEN AUCH OHNE IMU LÄUFT DER ARDUMOWER BESSER WIE INDEGO UND ALDI ZUSAMMEN
Das findet der I2C Scanner:
Code:
Scanning for I2C devices...
I2C device found at address 0x50 (probably AT24C32)
I2C device found at address 0x53 (probably ADXL345B)
I2C device found at address 0x68 (probably DS1307)
I2C device found at address 0x69 (probably MPU6050/9150 or L3G4200D)
I2C device found at address 0x77 (probably BMP180)
doneDas sagt der rs232:
Code:
IMU comm error
IMU comm error
IMU comm errorDie Kalibrierung von dem Gyro funktioniert der liefert auch Daten. Die hole ich mir über den ESP alles super. Der Beschleunigungssensor geht auch. Was aber absolut nix ausspuckt ist der Kompass. Mit der 1.0a9-Azurit und der aktuellen DEV das gleiche. Bei der Kompass Kalibrierung ist der Buzzer auch stille wenn ich das richtig verstehe sollte der bei der Kalibrierung was von sich geben da kommt nix. Ich verstehe auch nicht warum der Kompass nicht im I2C Scanner auftaucht.
Über rs232 ist auch nen bug die Menü Einträge sind vertauscht (consoleui.h Zeile 108,109 und 289-295):
Code:
Console.println(F("5=calibrate IMU compass start/stop"));
Console.println(F("6=calibrate IMU acceleration next side"));
Code:
case '5':
imu.calibAccNextAxis();
printMenu();
break;
case '6':
imu.calibComStartStop();
break;In der IMU.cpp steht auch was von GY-80 ist der von den I2C Adressen gleich mit dem GY-801?
Code:
// -------------I2C addresses ------------------------
#define ADXL345B (0x53) // ADXL345B acceleration sensor (GY-80 PCB)
#define HMC5883L (0x1E) // HMC5883L compass sensor (GY-80 PCB)
#define L3G4200D (0xD2 >> 1) // L3G4200D gyro sensor (GY-80 PCB)Sollte der HMC5883L nicht mit der Adresse 1E im I2C Scanner auftauchen? Ich hab hier was von Passthrough gelesen aber welcher der Steine auf dem GY-801 macht da ein Passthrough? Laut Datenblatt hängt doch der HMC5883L direkt an I2C.
Ein RIGOL DS1054 steht hier auch rum Spannung sind alle IO. Allerdings hab ich von I2C und Gyros kein plan. In der Testapp ist der Kompass auch auskommentiert.
imuahrs
Code:
/*Console.print(imu.com.x);
Console.print(",");
Console.print(imu.com.y);
Console.print(",");
Console.print(imu.com.z);*/Da es sich Praktisch um den gleichen Code handelt wie in Azurit gleicher Fehler Gyro geht Kompass nix...
Evtl. hat ja einer noch ein paar Infos für mich.
VIELEN DANK
UND GANZ HERZLICHEN DANK AN DIE ENTWICKLER DEN AUCH OHNE IMU LÄUFT DER ARDUMOWER BESSER WIE INDEGO UND ALDI ZUSAMMEN
{kind=link}