Hi,
ich habe vor eine Kommunikation zwischen der Ladestation und dem Mower zu implementieren.
Grund:
Die Beschaffenheit meines Grundstückes erlaubt mir den Verzicht der Induktionsschleife. Da der Mower trotzdem die
Ladestation finden soll, bin ich auf die Idee gekommen dies durch IR-Transmitter und IR-Receiver Dioden eine Kommunikation mit dem Mower herzustellen.
Inspieriert wurde ich eigentlich durch Wie erkennen ob der Roboter in der Ladestation ist
Vorab:
Ich hatte mal ein System gebaut, welches die Sonne verfolgt. 4 Fotowiederstände wurden hierzu auf eine Pyramiede gelötet und miteinander verglichen. Dadurch konnte (nach Kalibrierung) die Position der Sonne bestimmt werden. (Vorausgesetzt keine Wolke ist vor der Sonne)
Idee:
Da sich die Ladestation nicht auf Bäumen befindet benötigt man nur 2 IR-Receiver (links - rechts - Ausrichtung).
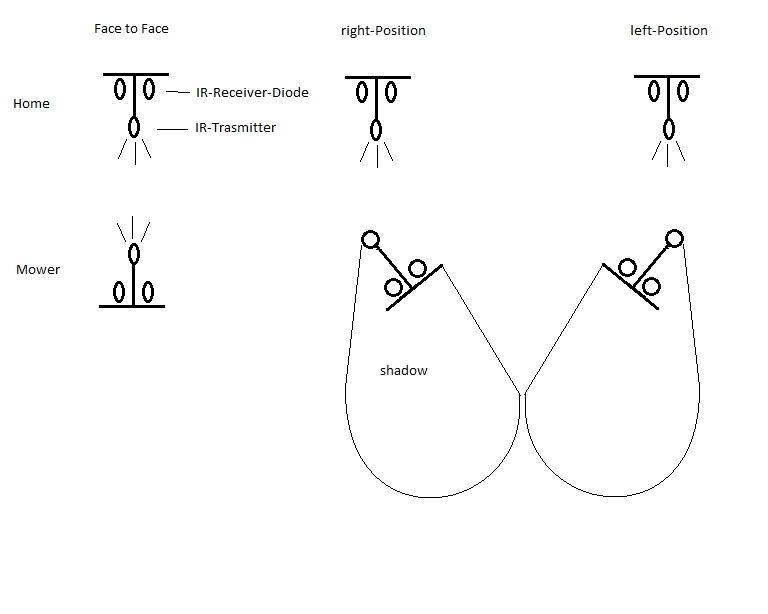
Die 2 Dioden werden durch eine Trennwand optisch getrennt auf eine Lochrasterplatine gelötet. Oben an der Trennwand kommt ein IR-Transmitter für die Kommunikation.
Dieses Gebilde wird auf der Ladestation in Einfahrtsrichtung und auf dem Mower in Fahrtrichtung platziert.
Sollte jetzt der Mower in die Ladestation wollen, versucht er zuerst diese anzusprechen (Wo bist du?) wenn nun etwas davor steht oder die Ladestation sich hinter dem Mower befindet fährt dieser ein bischen rum und versucht erneut einen Kontaktaufbau.
Wenn der Handshake erfolgt ist, kann anhand der Dioden bestimmt werden, in welcher Richtung sich die Ladestation befindet( rechts oder links)
Beispiel:
linke Diode der Ladestation empfängt das Signal -> Mower befindet sich links
rechts analog
empfangen beide Dioden das Signal -> Mower befindet sich in Face2Face Stellung
Ob man die Empfangenen Signalpegel vergleichen kann um ein genaues Navigieren des Mowers zu bewerkstelligen kann ich momentan nicht sagen, werde ich aber prüfen.
Hier noch ein kleines Paint-Bild") Aufbau der Dioden
Aufbau der Dioden
Das sind meine ersten Gedanken und wären des Schreibens sind mir auch noch verbesserungen für die Kontaktaufnahmen von Mower und LStation gekommen ....
Bin für Ratschläge und Ideen offen und dankbar.
MfG Christian
ich habe vor eine Kommunikation zwischen der Ladestation und dem Mower zu implementieren.
Grund:
Die Beschaffenheit meines Grundstückes erlaubt mir den Verzicht der Induktionsschleife. Da der Mower trotzdem die
Ladestation finden soll, bin ich auf die Idee gekommen dies durch IR-Transmitter und IR-Receiver Dioden eine Kommunikation mit dem Mower herzustellen.
Inspieriert wurde ich eigentlich durch Wie erkennen ob der Roboter in der Ladestation ist
Vorab:
Ich hatte mal ein System gebaut, welches die Sonne verfolgt. 4 Fotowiederstände wurden hierzu auf eine Pyramiede gelötet und miteinander verglichen. Dadurch konnte (nach Kalibrierung) die Position der Sonne bestimmt werden. (Vorausgesetzt keine Wolke ist vor der Sonne)
Idee:
Da sich die Ladestation nicht auf Bäumen befindet benötigt man nur 2 IR-Receiver (links - rechts - Ausrichtung).
Die 2 Dioden werden durch eine Trennwand optisch getrennt auf eine Lochrasterplatine gelötet. Oben an der Trennwand kommt ein IR-Transmitter für die Kommunikation.
Dieses Gebilde wird auf der Ladestation in Einfahrtsrichtung und auf dem Mower in Fahrtrichtung platziert.
Sollte jetzt der Mower in die Ladestation wollen, versucht er zuerst diese anzusprechen (Wo bist du?) wenn nun etwas davor steht oder die Ladestation sich hinter dem Mower befindet fährt dieser ein bischen rum und versucht erneut einen Kontaktaufbau.
Wenn der Handshake erfolgt ist, kann anhand der Dioden bestimmt werden, in welcher Richtung sich die Ladestation befindet( rechts oder links)
Beispiel:
linke Diode der Ladestation empfängt das Signal -> Mower befindet sich links
rechts analog
empfangen beide Dioden das Signal -> Mower befindet sich in Face2Face Stellung
Ob man die Empfangenen Signalpegel vergleichen kann um ein genaues Navigieren des Mowers zu bewerkstelligen kann ich momentan nicht sagen, werde ich aber prüfen.
Hier noch ein kleines Paint-Bild
Aufbau der Dioden
Das sind meine ersten Gedanken und wären des Schreibens sind mir auch noch verbesserungen für die Kontaktaufnahmen von Mower und LStation gekommen ....
Bin für Ratschläge und Ideen offen und dankbar.
MfG Christian