Hallo zusammen, ich brauche eure Expertise. Mein Rasenmäher/Sunray hat letztes Jahr großartig funktioniert. Ich wollte es heute wieder in Betrieb nehmen, doch leider ist ein seltsamer Fehler aufgetreten.
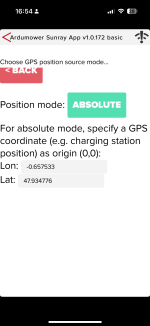
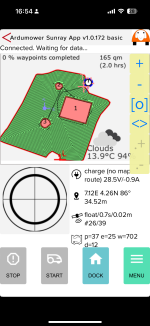
Sobald der Roboter das Dock verlässt, scheint er sich außerhalb des Bereichs zu befinden, die GPS-Koordinaten sind falsch. Die Option „Positionsmodus“ ist auf „absolut“ eingestellt und entspricht der Position des Docks.
Soll ich die Firmware neu einspielen?
Gibt es ein Update?
Danke Nicolas.
Sobald der Roboter das Dock verlässt, scheint er sich außerhalb des Bereichs zu befinden, die GPS-Koordinaten sind falsch. Die Option „Positionsmodus“ ist auf „absolut“ eingestellt und entspricht der Position des Docks.
Soll ich die Firmware neu einspielen?
Gibt es ein Update?
Danke Nicolas.
")