Kleine Info wie der GPS Empfang verbessert werden kann:
Einfach eine kleine Metallplatte unter das Modul, und schon wird die Signalstärke höher und mehr Satelliten empfangen.
Bei Internetseiten über Quatrocopter findet man spezielle Gehäuse die passgenau an das Modul (Masse) angelötet werden.
Ich habe einfach eine Aluplatte 5x5cm ca 6mm unter dem Modul, seitdem habe ich mitten im Arbeitszimmer anstatt nach 1h Wartezeit 3-4 Satelliten, 5-7, mit Rekord bei 9 Satelliten, und das nach nur ein paar Minuten Wartezeit.
Das Modul ist mittlerweile schon 5 Jahre alt, Bufferakku nahe am oder schon Defekt, und war damals schon nicht das Beste...
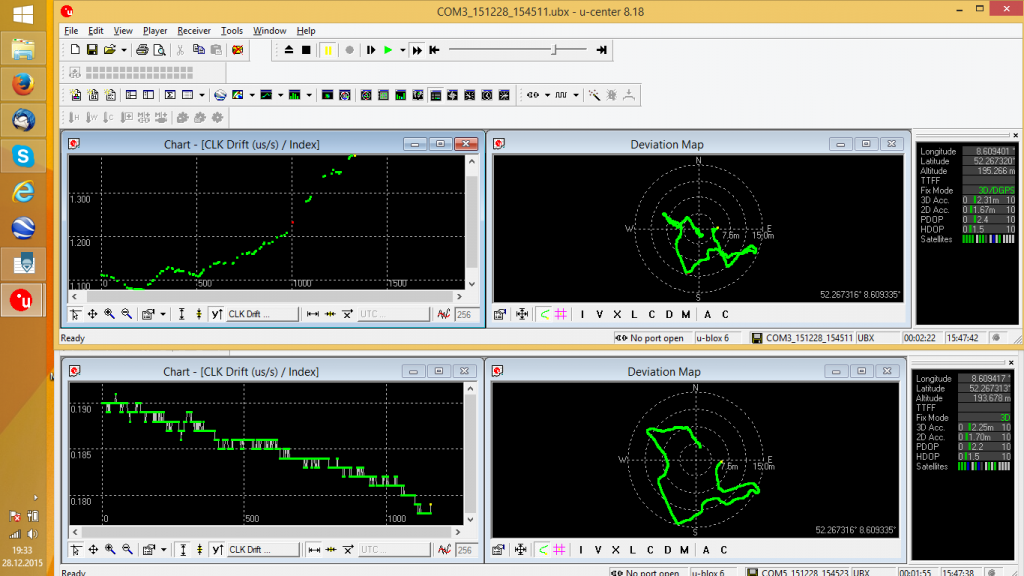
Bei mir hat es den Empfang eindeutig verbessert, sieht man auch gut mit der u-blox Software wie die db Anzeigen der Satelliten um 3-5db nach oben springen wenn man die Aluplatte unter das Modul legt.
Interesanterweise ist es egal ob die Platte an Masse angeschlossen wird oder nicht. Habe es trotzdem getan, vielleicht wirkt es später im Betrieb als Schirmung gegen Störungen.
LG!
Einfach eine kleine Metallplatte unter das Modul, und schon wird die Signalstärke höher und mehr Satelliten empfangen.
Bei Internetseiten über Quatrocopter findet man spezielle Gehäuse die passgenau an das Modul (Masse) angelötet werden.
Ich habe einfach eine Aluplatte 5x5cm ca 6mm unter dem Modul, seitdem habe ich mitten im Arbeitszimmer anstatt nach 1h Wartezeit 3-4 Satelliten, 5-7, mit Rekord bei 9 Satelliten, und das nach nur ein paar Minuten Wartezeit.
Das Modul ist mittlerweile schon 5 Jahre alt, Bufferakku nahe am oder schon Defekt, und war damals schon nicht das Beste...
Bei mir hat es den Empfang eindeutig verbessert, sieht man auch gut mit der u-blox Software wie die db Anzeigen der Satelliten um 3-5db nach oben springen wenn man die Aluplatte unter das Modul legt.
Interesanterweise ist es egal ob die Platte an Masse angeschlossen wird oder nicht. Habe es trotzdem getan, vielleicht wirkt es später im Betrieb als Schirmung gegen Störungen.
LG!
")






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}