Hallo Freunde,
wer kann mir einmal etwas auf die "Sprünge" helfen?
Ich denke gerade etwas über das folgende GPS-Thema theor. nach:
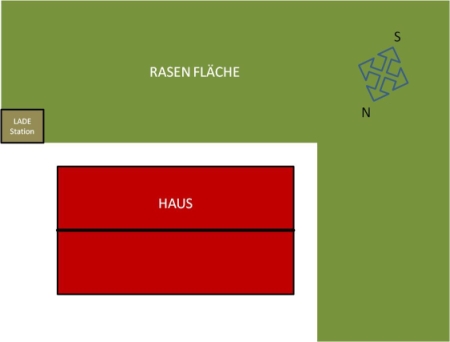
Ausgehend von einem x-beliebigen Standort des Rob im Garten. Der Rob hat ein GPS mit an Board. Der Standort der Ladestation (mit einer mögl. Genauigkeit ca. +-2m) ist über GPS Daten vorhanden/bekannt. Es findet eine laufende aktuelle Standortbestimmung alle 2-5 Sek. im Rob statt. Wie komme ich nun in die Nähe der Ladestation?
Wie überlagere ich den normalen Fahrbetrieb des Rob (ohne Mähen) und den sicher vielen Kollisionen im Garten mit den aktuellen GPS Daten zur Kurskorrektur?
Oder anders gefragt: Kann ich aus den GPS-Daten die ich erhalte, eine Kurskorrektur errechnen die den Rob zu den Ziel-Koordinaten bringt?
wer kann mir einmal etwas auf die "Sprünge" helfen?
Ich denke gerade etwas über das folgende GPS-Thema theor. nach:
Ausgehend von einem x-beliebigen Standort des Rob im Garten. Der Rob hat ein GPS mit an Board. Der Standort der Ladestation (mit einer mögl. Genauigkeit ca. +-2m) ist über GPS Daten vorhanden/bekannt. Es findet eine laufende aktuelle Standortbestimmung alle 2-5 Sek. im Rob statt. Wie komme ich nun in die Nähe der Ladestation?
Wie überlagere ich den normalen Fahrbetrieb des Rob (ohne Mähen) und den sicher vielen Kollisionen im Garten mit den aktuellen GPS Daten zur Kurskorrektur?
Oder anders gefragt: Kann ich aus den GPS-Daten die ich erhalte, eine Kurskorrektur errechnen die den Rob zu den Ziel-Koordinaten bringt?
{kind=link}
{kind=link}