Ich habe nach einigen Tagen Überlegung, einigen Nachfragen im Forum nun mit dem Projet begonnen.
Derzeit stehen folgende Eckdaten fest.
1. Alle Motoren 12 V
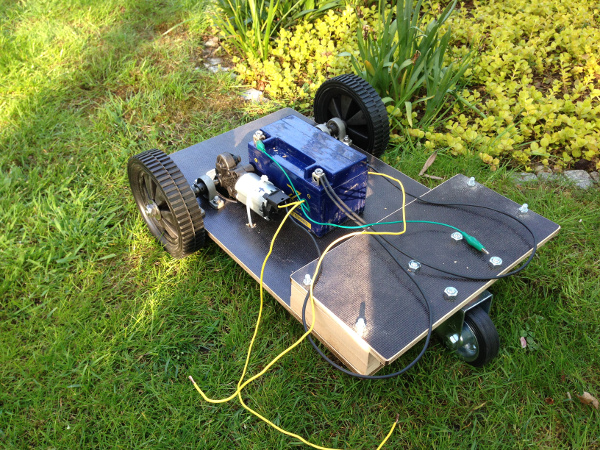
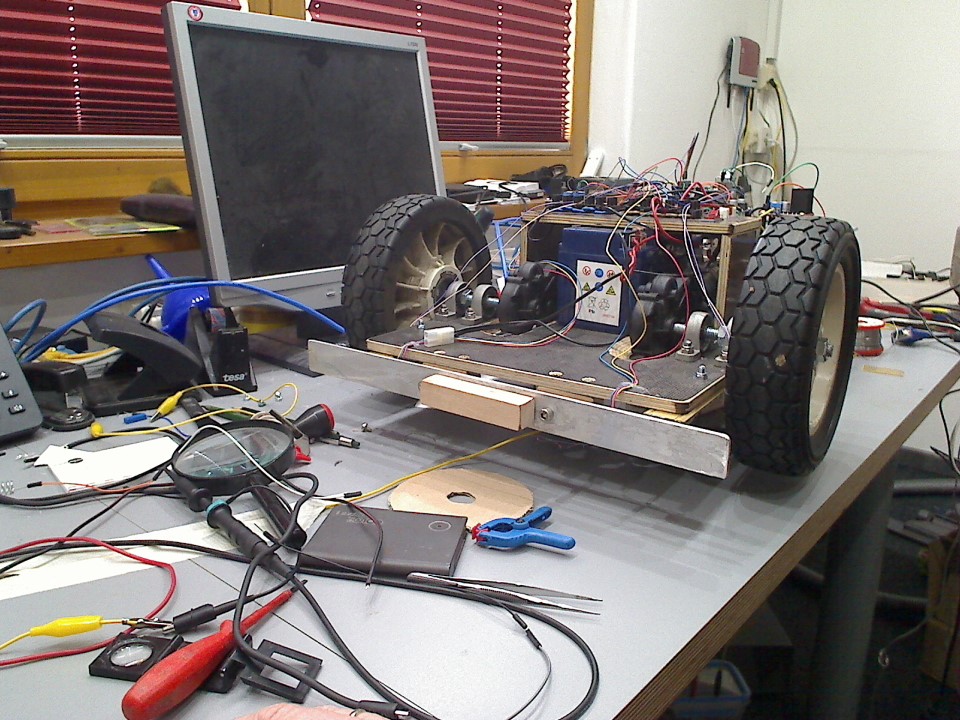
2. Testchassis aus Siebdruckplatte (wenn alles steht kommt ein GFK Chassis)
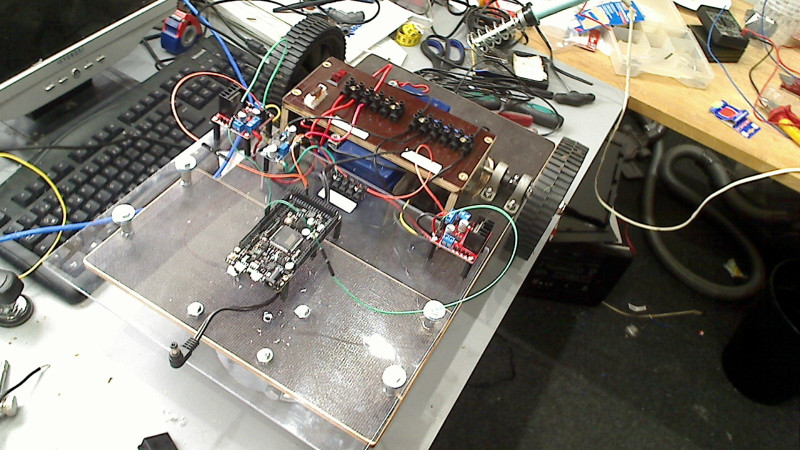
3. Pollin Getriebemotor
(Steppermotoren mit 1:5 Zahnriemengetriebe (wegen der bessern Steuerbarkeit) werde ich aber testen)
4. Ardurino DUE
5. Dreiradkonstruktion als Frontantrieb.
Da ich bei der Portierung auf den Due doch einiges an der Software ändern müsste, hab ich mich entschlossen die Ardusoftware als Richtschnur und Ideenpool zu nutzen. Ich werde die Due Version aber neu Coden.
Da der Due Leistungsfähiger ist als der Mega will ich zunächst alle Sensoren vom Due auswerten lassen. Ob sich das bewährt werde ich während der Evolution sehen.
Weiter möchte ich von Anfang an eine Wlan Kommunikation mit dem Mäher aufbauen.
Die Kommunikation soll folgende Aufgaben erfüllen:
- Umschalten von Betriebszuständen (Z.B.Mähen > Heimfahrt)[Phase 1]
- Fernsteuerung [Phase 1]
- Anzeigen der Daten des Mähers [später]
- Anzeige der Ermittelten Karte (Schleifenfahrt, Odometrie)[später]
- Anzeige der Position auf der Karte [später]
- Darstellung des Mähvorgangs ähnlich der Darstelllung im Simulator [später]
Da ich zufälliges Mähen als recht uneffizient empfinde möchte ich den Mäher in Bahnen mähen lassen.
Geplant ist folendes Verhalten.
- suchen der Schleife
- Mähen entlang der Schleife
- Zweite Mährunde am Rand aber um eine halbe Bahn nach innen gesetzt. Ich hoffe der Due schafft die Mathematik
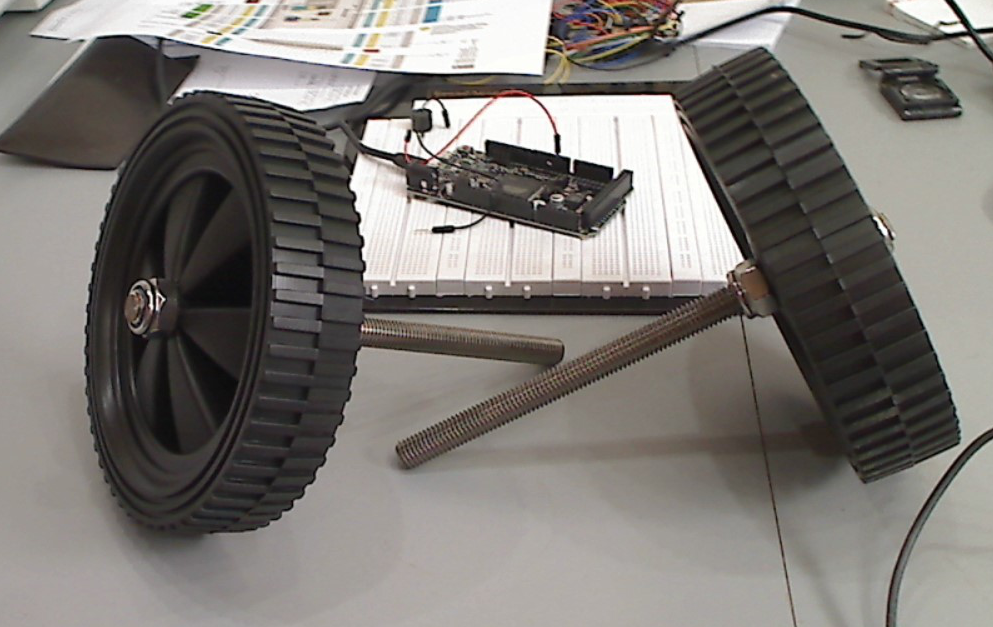
Aber zunächst wird ein Chassis gebaut
Derzeit stehen folgende Eckdaten fest.
1. Alle Motoren 12 V
2. Testchassis aus Siebdruckplatte (wenn alles steht kommt ein GFK Chassis)
3. Pollin Getriebemotor
(Steppermotoren mit 1:5 Zahnriemengetriebe (wegen der bessern Steuerbarkeit) werde ich aber testen)
4. Ardurino DUE
5. Dreiradkonstruktion als Frontantrieb.
Da ich bei der Portierung auf den Due doch einiges an der Software ändern müsste, hab ich mich entschlossen die Ardusoftware als Richtschnur und Ideenpool zu nutzen. Ich werde die Due Version aber neu Coden.
Da der Due Leistungsfähiger ist als der Mega will ich zunächst alle Sensoren vom Due auswerten lassen. Ob sich das bewährt werde ich während der Evolution sehen.
Weiter möchte ich von Anfang an eine Wlan Kommunikation mit dem Mäher aufbauen.
Die Kommunikation soll folgende Aufgaben erfüllen:
- Umschalten von Betriebszuständen (Z.B.Mähen > Heimfahrt)[Phase 1]
- Fernsteuerung [Phase 1]
- Anzeigen der Daten des Mähers [später]
- Anzeige der Ermittelten Karte (Schleifenfahrt, Odometrie)[später]
- Anzeige der Position auf der Karte [später]
- Darstellung des Mähvorgangs ähnlich der Darstelllung im Simulator [später]
Da ich zufälliges Mähen als recht uneffizient empfinde möchte ich den Mäher in Bahnen mähen lassen.
Geplant ist folendes Verhalten.
- suchen der Schleife
- Mähen entlang der Schleife
- Zweite Mährunde am Rand aber um eine halbe Bahn nach innen gesetzt. Ich hoffe der Due schafft die Mathematik
Aber zunächst wird ein Chassis gebaut
")



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}