Tinker
Member
Hi,
habe heute bei einem schönen Sonnentag meinen in den letzten Monaten hergerichteten Ardumower Umbau meines Robomow RL500 etwas länger auf dem Rasen ausprobiert.
Zuerst mal meine Konfiguration: SW-Basis Sunray 1.0.298 mit Anpassungen an die Ansteuerung der Fahrmotoren und der 3 Mähmotoren. Bumpersensor, 3 IR-Sensoren. RDK System mit SAPOS. Die IMU wird beim Start immer inialisiert. Die Strommessung der Fahrmotoren habe ich deaktiviert indem ich „leftCurrent“ und „rightCurrent“ auf „1“ gesetzt habe. Die Strommessung muss ich später noch anpassen … Bumper- und IR-Sensoren sind deaktiviert.
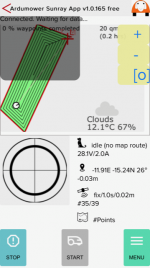
App auf Iphone. Mower lässt sich gut per Hand mit der App verfahren. Fix ist (so gut wie) immer vorhanden.
Habe eine Testmap mit 5 Punkten aufgenommen und den Mower in „Das Grüne“ positioniert. Siehe Anhang.
1. Frage: Wieso bekomme ich trotzdem „no map route“? (War auch schon mal weg, kann aber keine Systematik erkennen.
2. Frage: Ich sehe auf der App immer ein graues Viereck in der Map Region, finde aber keine Info dazu. Was hat es damit auf sich?
Wenn ich aus dem Grün heraus das Mähen starte, (die Mähmotoren schalte ich erst mal über die App aus), fährt der Mäher nur im Kreis und die Log Daten sehen folgendermaßen aus:
…
setOperation op=1
changeOperationType
==> changeOp:Mow(initiatedByOperator 1)
OP_MOW
clearObstacles
Map::startMowing
findObstacleSafeMowPoint checking -7.91,-9.97
findPath (-11.83,-15.17) (-7.91,-9.97)
path finder is enabled (using FLOAT_CALC)
freem=244563 allocating nodes 7 (168 bytes)
freem=244563
starting path-finder
.finish nodes=7 duration=4
node pt=-7.91,-9.97
node pt=-11.83,-15.17
reset left / right rotation - DiffDelta overflow
0:4:49 ctlDur=0.02 op=Mow(initiatedByOperator 1) freem=244699 sp=469E5 bat=27.87(2.02) chg=0.12(0.01) tg=-7.91,-9.97 x=-11.89 y=-15.20 delta=0.40 tow=145797000 lon=8.08795282 lat=50.36699340 h=227.8 n=0.37 e=-0.45 d=9.38 sol=2 age=0.94
0:4:54 ctlDur=0.02 op=Mow(initiatedByOperator 1) freem=244699 sp=47D70 bat=27.86(2.02) chg=0.11(0.01) tg=-7.91,-9.97 x=-11.93 y=-15.23 delta=0.39 tow=145802000 lon=8.08795222 lat=50.36699312 h=227.8 n=0.34 e=-0.49 d=9.41 sol=2 age=0.92
setOperation op=0
changeOperationType
==> changeOp:Idle(initiatedByOperator 1)
OP_IDLE
...
Auffällig ist für mich die Zeile „reset left / right rotation - DiffDelta overflow“
Hat hier jemand eine Idee?
VG Mario
habe heute bei einem schönen Sonnentag meinen in den letzten Monaten hergerichteten Ardumower Umbau meines Robomow RL500 etwas länger auf dem Rasen ausprobiert.
Zuerst mal meine Konfiguration: SW-Basis Sunray 1.0.298 mit Anpassungen an die Ansteuerung der Fahrmotoren und der 3 Mähmotoren. Bumpersensor, 3 IR-Sensoren. RDK System mit SAPOS. Die IMU wird beim Start immer inialisiert. Die Strommessung der Fahrmotoren habe ich deaktiviert indem ich „leftCurrent“ und „rightCurrent“ auf „1“ gesetzt habe. Die Strommessung muss ich später noch anpassen … Bumper- und IR-Sensoren sind deaktiviert.
App auf Iphone. Mower lässt sich gut per Hand mit der App verfahren. Fix ist (so gut wie) immer vorhanden.
Habe eine Testmap mit 5 Punkten aufgenommen und den Mower in „Das Grüne“ positioniert. Siehe Anhang.
1. Frage: Wieso bekomme ich trotzdem „no map route“? (War auch schon mal weg, kann aber keine Systematik erkennen.
2. Frage: Ich sehe auf der App immer ein graues Viereck in der Map Region, finde aber keine Info dazu. Was hat es damit auf sich?
Wenn ich aus dem Grün heraus das Mähen starte, (die Mähmotoren schalte ich erst mal über die App aus), fährt der Mäher nur im Kreis und die Log Daten sehen folgendermaßen aus:
…
setOperation op=1
changeOperationType
==> changeOp:Mow(initiatedByOperator 1)
OP_MOW
clearObstacles
Map::startMowing
findObstacleSafeMowPoint checking -7.91,-9.97
findPath (-11.83,-15.17) (-7.91,-9.97)
path finder is enabled (using FLOAT_CALC)
freem=244563 allocating nodes 7 (168 bytes)
freem=244563
starting path-finder
.finish nodes=7 duration=4
node pt=-7.91,-9.97
node pt=-11.83,-15.17
reset left / right rotation - DiffDelta overflow
0:4:49 ctlDur=0.02 op=Mow(initiatedByOperator 1) freem=244699 sp=469E5 bat=27.87(2.02) chg=0.12(0.01) tg=-7.91,-9.97 x=-11.89 y=-15.20 delta=0.40 tow=145797000 lon=8.08795282 lat=50.36699340 h=227.8 n=0.37 e=-0.45 d=9.38 sol=2 age=0.94
0:4:54 ctlDur=0.02 op=Mow(initiatedByOperator 1) freem=244699 sp=47D70 bat=27.86(2.02) chg=0.11(0.01) tg=-7.91,-9.97 x=-11.93 y=-15.23 delta=0.39 tow=145802000 lon=8.08795222 lat=50.36699312 h=227.8 n=0.34 e=-0.49 d=9.41 sol=2 age=0.92
setOperation op=0
changeOperationType
==> changeOp:Idle(initiatedByOperator 1)
OP_IDLE
...
Auffällig ist für mich die Zeile „reset left / right rotation - DiffDelta overflow“
Hat hier jemand eine Idee?
VG Mario