paddy
Active member
Hello to all,
recently, we made some progress on this chassis and im my opinion, most problems seems to be solved. But there is at least one big issue I want to discuss here instead on my build thread because I think, it will be relevant for everyone.
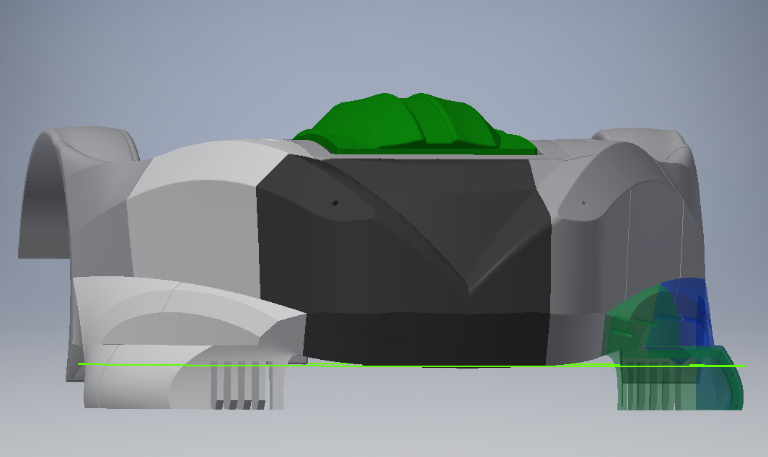
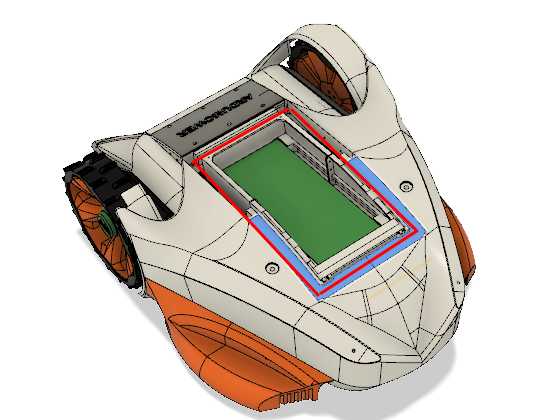
One think totally missing on this chassis design is the bumper. I can't find any information about how this should be implemented and also in Fusion files, there is no answer about this. For me, I want to use the complete chassis as bumper and want to get rid of small bumper areas which in some cases will not be hit even the robot collids with an obstacle.
The chassis should be mounted on some kind of rubber dampers. I don't know how rigid they are (Shore), but these parts must be flexible enough to move the body. Also, they must be rigid enough to bring the chassis back in position and also to avoid a shaking body on rough terrains. I'm not sure if the dampers of the shop will solve this, but we can print them out of flexible filaments in any strength and also can mold them with silicone.
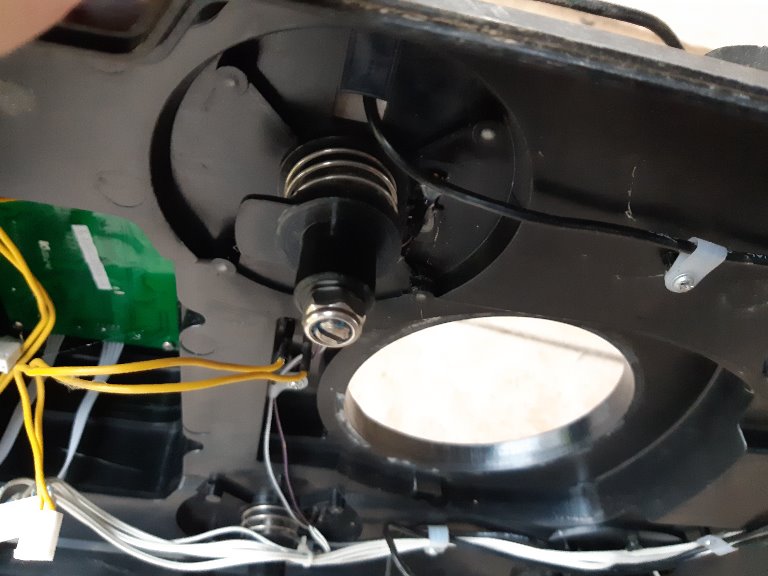
Most important for me is, how to discover if body is displaced, aka collids with an obstacle. Im my opinion, there are different solutions
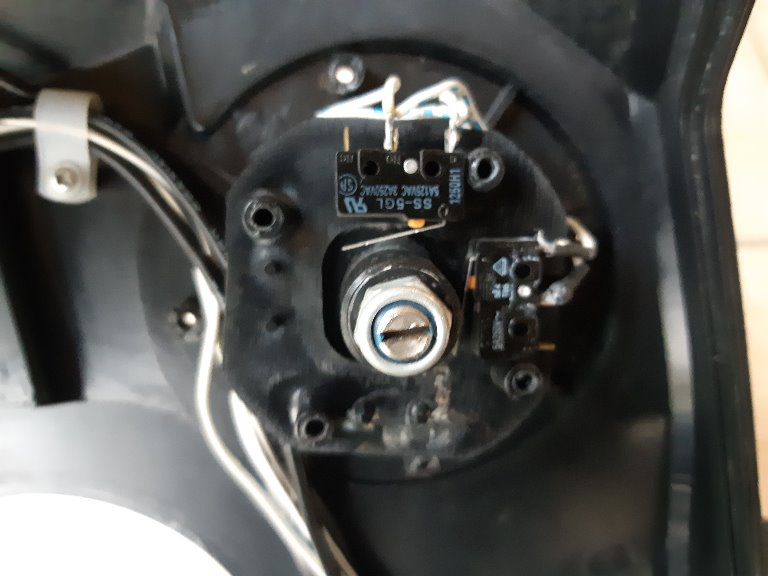
- monetary swichtes/micro switches close to the body (on PCB Box for example). They get pressed by body
- multiple hall sensors to detect a glued magnet. If it is outside a definded offset, it triggers the bumper (can be solved by ATTINY or other without changing Ardumower code)
- Reed switches which are generally closed by a magnet and opens when magnet moves away
- Bumperduino, tube around PCB Box, chassis will compress the tube and triggers event
What do you think, is the best solution here? In my opinion, magnets are best but it is not easy to set zero point for offset detection. Also they may influence perimeter receiver and compass. So it is important to find a proper place for them.
Bumperduino might work but I find this is a expensive solution and I don't have any experience with this so far.
Switches are the most easy solution but they need to be protected carefully from dirt to work.
Patrick
recently, we made some progress on this chassis and im my opinion, most problems seems to be solved. But there is at least one big issue I want to discuss here instead on my build thread because I think, it will be relevant for everyone.
One think totally missing on this chassis design is the bumper. I can't find any information about how this should be implemented and also in Fusion files, there is no answer about this. For me, I want to use the complete chassis as bumper and want to get rid of small bumper areas which in some cases will not be hit even the robot collids with an obstacle.
The chassis should be mounted on some kind of rubber dampers. I don't know how rigid they are (Shore), but these parts must be flexible enough to move the body. Also, they must be rigid enough to bring the chassis back in position and also to avoid a shaking body on rough terrains. I'm not sure if the dampers of the shop will solve this, but we can print them out of flexible filaments in any strength and also can mold them with silicone.
Most important for me is, how to discover if body is displaced, aka collids with an obstacle. Im my opinion, there are different solutions
- monetary swichtes/micro switches close to the body (on PCB Box for example). They get pressed by body
- multiple hall sensors to detect a glued magnet. If it is outside a definded offset, it triggers the bumper (can be solved by ATTINY or other without changing Ardumower code)
- Reed switches which are generally closed by a magnet and opens when magnet moves away
- Bumperduino, tube around PCB Box, chassis will compress the tube and triggers event
What do you think, is the best solution here? In my opinion, magnets are best but it is not easy to set zero point for offset detection. Also they may influence perimeter receiver and compass. So it is important to find a proper place for them.
Bumperduino might work but I find this is a expensive solution and I don't have any experience with this so far.
Switches are the most easy solution but they need to be protected carefully from dirt to work.
Patrick
")



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}