Du verwendest einen veralteten Browser. Es ist möglich, dass diese oder andere Websites nicht korrekt angezeigt werden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Anleitungen
- Ersteller naneona
- Erstellt am
Hi
hat jemand die Möglichkeit eventuell eine Kurze Anleitung zu verfassen, bezüglich des Zusammenbaus??
Ich habe gelesen das da auch ein Ladestrom Sensor sein soll ???
Ich weiß es ist viel Arbeit aber für die die es nach bauen wollen wäre es eine super Erleichterung und wenn es mehr Leute gibt die es nach bauen dann gibt es auch mehr Leute die testen können und über das Projekt berichten.
Mfg Hendrik
hat jemand die Möglichkeit eventuell eine Kurze Anleitung zu verfassen, bezüglich des Zusammenbaus??
Ich habe gelesen das da auch ein Ladestrom Sensor sein soll ???
Ich weiß es ist viel Arbeit aber für die die es nach bauen wollen wäre es eine super Erleichterung und wenn es mehr Leute gibt die es nach bauen dann gibt es auch mehr Leute die testen können und über das Projekt berichten.
Mfg Hendrik
Hier wäre mein momentaner stand der Hardware der Rest ist unterwegs
MfG Hendrik
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/902/hd4f1533.jpg/
MfG Hendrik
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/902/hd4f1533.jpg/
{kind=link}
Zuletzt bearbeitet von einem Moderator:
Hendrik schrieb:Hi
hat jemand die Möglichkeit eventuell eine Kurze Anleitung zu verfassen, bezüglich des Zusammenbaus??
Ich habe gelesen das da auch ein Ladestrom Sensor sein soll ???
Hallo Hendrik,
ich versuche immer alles auf meinem Blog zusammenzufassen.
Der Ladestromsensor ist ein weiterer Stromsensor welcher zwischen Akku (+) und Ladegerätanschluß (+) kommt (also in Reihe geschaltet) und den Strom mißt welcher vom Ladegerät zum Akku fließt. Darüber weiß die Steuerung wann der Akku geladen ist (es fließt dann kein Strom mehr). Ein Schaltbild ist hier zu finden. Das Relais habe ich erstmal ganz weggelassen (nicht unbedingt notwendig).
Desweiteren gibt es noch einen Batteriespannungssensor, welcher ein Spannungsteiler ist (also parallel zum Akku geschaltet).
Ich mache die Anleitung auch noch "schöner" wenn sich alles in der Praxis bewährt hat. Noch ist alles prototypisch und muss getestet werden...
Gruss,
Alexander
Zuletzt bearbeitet von einem Moderator:
Hallo Alexander,
bekomme meine Steuerung nicht zum laufen.
Hab da mal ne Frage zu einem der Schaltbilder.
Einmal läuft Motor_PWM auf den Kontakt IN1 und auf der anderen Seite auf IN3.
Ist das so richtig?
Wenn ich nur die Fahrmotortreiber und Stromsensoren verkabelt habe, und Pin51 mit Gnd Brücke müssten die Motoren erst mal anlaufen?
bekomme meine Steuerung nicht zum laufen.
Hab da mal ne Frage zu einem der Schaltbilder.
Einmal läuft Motor_PWM auf den Kontakt IN1 und auf der anderen Seite auf IN3.
Ist das so richtig?
Wenn ich nur die Fahrmotortreiber und Stromsensoren verkabelt habe, und Pin51 mit Gnd Brücke müssten die Motoren erst mal anlaufen?
naneona schrieb:Hallo Alexander,
bekomme meine Steuerung nicht zum laufen.
Hab da mal ne Frage zu einem der Schaltbilder.
Einmal läuft Motor_PWM auf den Kontakt IN1 und auf der anderen Seite auf IN3.
Ist das so richtig?
Wenn ich nur die Fahrmotortreiber und Stromsensoren verkabelt habe, und Pin51 mit Gnd Brücke müssten die Motoren erst mal anlaufen?
Hallo,
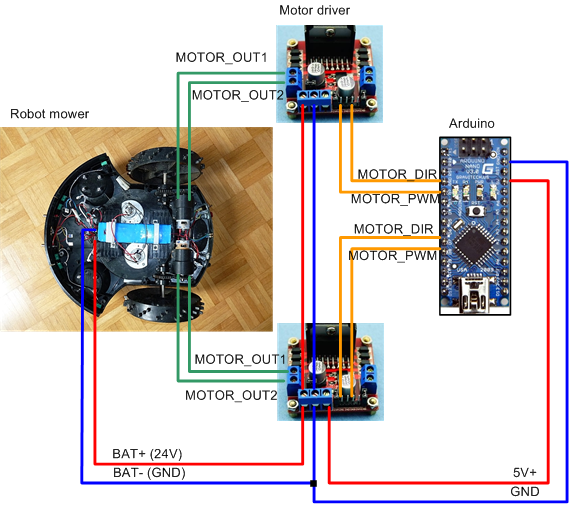
das Schaltbild ist an dieser Stelle leider zu ungenau. Daher hier mal genauer:
1.Zunächst sicherstellen, dass die beiden Motortreiberbrücken parallel geschaltet wurden ( Bild ).
IN1 mit IN4
IN2 mit IN3
OUT1 mit OUT4
OUT2 mit OUT3
PS: IN1 ist jetzt also indentisch mit IN4 bzw. IN2 mit IN3.
2. Sicherstellen, dass auf ENA und ENB jeweils ein Jumper sitzt (also beide Brücken aktiviert sind).
3. Der Jumper für den Spannungsregler muss ebenfalls sitzen (LED auf Platine leuchtet).
4. Nun Arduino Pins verbinden:
"IN2" wird auch manchmal als "C" bezeichnet, oder als "10" oder als PinPWM.
"IN1" wird auch manchmal als "D" bezeichnet, oder als "12" oder als PinDir.
Code:
L298 motor driver
IN2/C(10)/PinPWM IN1/D(12)/PinDir
H L Forward
L H ReverseDamit sollte eigentlich alles klar sein. Die Logik beim ansteuern ist wie folgt:
Wird PinDir auf LOW (L) geschaltet, steuert PinPWM die Geschwindigkeit. Ist PinPWM dabei dauerthaft HIGH (H), fährt der Robot mit voller Leistung vorfährts. Je seltener PinPWM auf HIGH geschaltet wird, umso langsamer fährt der Robot vorfährts.
Wird PinDir auf HIGH (H) geschaltet, steuert PinPWM die Geschwindigkeit. Ist PinPWM dabei dauerhaft LOW (L), fährt der Robot mit voller Leistung rückwärts. Je seltener PinPWM auf LOW geschaltet wird, umso langsamer fährt der Robot rückwärts.
Nun zum Testen (auch für spätere Dinge wie Sensoren etc.):
Am einfachsten ist es die Serielle Arduino-Konsole aufzumachen (CTRL+SHIFT+M), dann 19200 Baud einzustellen. Dort sieht man dann alle Sensorwerte etc.
Nun drückt man 't' um in den Testmodus zu gelangen. Dort kann man dann die Motoren testen. Achja: Robot am besten dazu aufbocken (z.B. auf Karton). Und vorsichtig mit den Messern! ;-)
PS: Die Anschlüsse der Motoren (OUT1, OUT2) müssen evtl. getauscht werden wenn die Drehrichtung nicht stimmt (also vorwärts nicht vorwärts ist).
Zuletzt bearbeitet von einem Moderator:
ES läuft.
Mein Problem war die (noch) Zweigeteilte Spannungsversorgung.
Die Treiber und Motoren laufen über den Akku.
Das Arduino Board läuft über eine externe Versorgung.
Nach dem Vorgeschlagenen Test von Alexander bin ich ins Grübeln gekommen und (mit der Hand vor die Stirn schlagend) war die Sache klar.
Ich musste die Masse vom Motortreiber mit der Masse vom Board verbinden.
Nun laufen die Motoren im Testprogramm wie gewünscht und ich kann mich an die Schleifensensoren machen.
DANKE an Alexander für den Schubs in die richtige Richtung.
Mein Problem war die (noch) Zweigeteilte Spannungsversorgung.
Die Treiber und Motoren laufen über den Akku.
Das Arduino Board läuft über eine externe Versorgung.
Nach dem Vorgeschlagenen Test von Alexander bin ich ins Grübeln gekommen und (mit der Hand vor die Stirn schlagend) war die Sache klar.
Ich musste die Masse vom Motortreiber mit der Masse vom Board verbinden.
Nun laufen die Motoren im Testprogramm wie gewünscht und ich kann mich an die Schleifensensoren machen.
DANKE an Alexander für den Schubs in die richtige Richtung.
naneona schrieb:ES läuft.
Mein Problem war die (noch) Zweigeteilte Spannungsversorgung.
Die Treiber und Motoren laufen über den Akku.
Das Arduino Board läuft über eine externe Versorgung.
Stimmt - die Masse des Arduino auf jeden Fall mit der Akku-Masse verbinden. Sonst fließt da kein Strom, wo Strom fließen soll
")
Gut dass Du das erwähnt hast, ich hatte dasselbe Problem damals auch mal gehabt und daran nun jetzt als Fehlerquelle überhaupt nicht gedacht!
Zuletzt bearbeitet von einem Moderator:
Ich bräuchte nochmal Hilfe bei der Nano Verdrahtung für die Sensoren.
Spulen statt Micros ist klar.
Spannungsversorgung ist auch kein Problem.
Die Out Ausgänge der Soundplatinen gehen auf A0 und A1 vom Nano.
Wie laufen die Verbindungen zwischen Nano und Mega Board?
Danke Markus
Spulen statt Micros ist klar.
Spannungsversorgung ist auch kein Problem.
Die Out Ausgänge der Soundplatinen gehen auf A0 und A1 vom Nano.
Wie laufen die Verbindungen zwischen Nano und Mega Board?
Danke Markus
naneona schrieb:Ich bräuchte nochmal Hilfe bei der Nano Verdrahtung für die Sensoren. Spulen statt Micros ist klar. Spannungsversorgung ist auch kein Problem. Die Out Ausgänge der Soundplatinen gehen auf A0 und A1 vom Nano.
Wie laufen die Verbindungen zwischen Nano und Mega Board?
Code:
Spule Rechts --- (In) Sound Sensor (Out) -- Nano (pinA0)
Spule Links --- (In) Sound Sensor (Out) -- Nano (pinA1)
Nano (Out0=pin11) ------- 200k -+------- Mega (pinPerimeterRight=A4)
|
0.1 uF
|
GND
Nano (Out1=pin10) ------- 200k -+------- Mega (pinPerimeterLeft=A5)
|
0.1 uF
|
GNDDer RC-Tiefpaß soll das erzeugte PWM-Signal am Nano Ausgang (Out0/1) zu einer Gleichspannung "glätten" (so dass man diese Gleichspannung am Mega ADC messen kann).
Die Nano-Schaltung kann getrennt getestet werden. Dazu die beiden Spulen in 30-40cm Abstand fixieren (z.B. auf einem Brett). Nun von rechts oder links der Schleife nähern. Die Nano-LED muss anfangen zu blinken. Dann weiter zum Mittelpunkt der Schleife nähern. Jetzt muss die Nano-LED dauerhaft leuchten (evtl. passiert dies nur bei
Zuletzt bearbeitet von einem Moderator:
Gibt jetzt ein Schaltbild vom Gesamtprojekt:
http://grauonline.de/wordpress/wp-content/uploads/ardumower_schematics.png
Happy mowing!
http://grauonline.de/wordpress/wp-content/uploads/ardumower_schematics.png
Happy mowing!
helldriver
Member
Super Arbeit die du/ihr hier gemacht habt.
Meine Teile sind leider noch nicht geliefert worden somit habe ich auch noch keine Praxiserfahrung. Aber ich freue mich schon sehr auf den Umbau und damit auch eine taugliche Steuerung meines TC-g158. Bei dem Schaltbild ist mir aufgefallen, das ein Masseanschluß am Minuspol der Batterie fehlt. Ist das evtl. Vergessen worden oder habe ich einen Denkfehler? Und bei den Motortreiber steht 12 V. Die werden aber an dem Anschluß doch mit 24v betrieben oder irre ich mich da.
Des weiteren würde ich auch gerne meine Mähmotoren, die unglaublichen Lärm verursachen, gegen einen bürstenlosen Motor austauschen. Ich habe dazu bei robi2mow auch einen erfolgreichen Umbau gefunden. Doch leider finde ich diesen Motor nirgends zu finden. Hat hier jemand evtl. einen Tipp für mich oder eine Alternative?
Gruß
Stephan
Meine Teile sind leider noch nicht geliefert worden somit habe ich auch noch keine Praxiserfahrung. Aber ich freue mich schon sehr auf den Umbau und damit auch eine taugliche Steuerung meines TC-g158. Bei dem Schaltbild ist mir aufgefallen, das ein Masseanschluß am Minuspol der Batterie fehlt. Ist das evtl. Vergessen worden oder habe ich einen Denkfehler? Und bei den Motortreiber steht 12 V. Die werden aber an dem Anschluß doch mit 24v betrieben oder irre ich mich da.
Des weiteren würde ich auch gerne meine Mähmotoren, die unglaublichen Lärm verursachen, gegen einen bürstenlosen Motor austauschen. Ich habe dazu bei robi2mow auch einen erfolgreichen Umbau gefunden. Doch leider finde ich diesen Motor nirgends zu finden. Hat hier jemand evtl. einen Tipp für mich oder eine Alternative?
Gruß
Stephan
helldriver schrieb:Super Arbeit die du/ihr hier gemacht habt.
Meine Teile sind leider noch nicht geliefert worden somit habe ich auch noch keine Praxiserfahrung. Aber ich freue mich schon sehr auf den Umbau und damit auch eine taugliche Steuerung meines TC-g158. Bei dem Schaltbild ist mir aufgefallen, das ein Masseanschluß am Minuspol der Batterie fehlt. Ist das evtl. Vergessen worden oder habe ich einen Denkfehler? Und bei den Motortreiber steht 12 V. Die werden aber an dem Anschluß doch mit 24v betrieben oder irre ich mich da.
Des weiteren würde ich auch gerne meine Mähmotoren, die unglaublichen Lärm verursachen, gegen einen bürstenlosen Motor austauschen. Ich habe dazu bei robi2mow auch einen erfolgreichen Umbau gefunden. Doch leider finde ich diesen Motor nirgends zu finden. Hat hier jemand evtl. einen Tipp für mich oder eine Alternative?
Gruß
Stephan
Hallo Stephan,
vielen Dank für Deinen Beitrag - ich habe die Fehler im Schaltbild korrigiert.
Idee zum Brushless-Motor:
Im Modellbau-Bereich gibt es viele bürstenlose Motoren (eBay-Suche "Brushless motor") mit passendem Regler (für 24V wird man aber etwas suchen müssen - angegeben wird meist die Anzahl der LiPo-Zellen, also 1s=3.7V 2s=7.4V, 3s=11.1V, 4s=14.8V usw.). Die Drehzahl wird meist mit KV angegeben (Leerlauf-Drehzahl pro Volt). Für die Mähmesser sind wohl etwa 3000-5000 Umdrehungen (mit Messer) pro Minute nötig. Man sollte auch auf einen möglichst großen Motorwelle-Durchmesser achten. Beim Tianchen ist der Wellendurchmesser definitiv zu klein (und so verbiegt sich die Welle irgendwann und das Messer läuft unrund und verursacht dann den Lärm).
Falls jemand einen passenden Motor (und Regler) findet, bitte hier posten
Gruss,
Alexander
Zuletzt bearbeitet von einem Moderator:
helldriver
Member
Hallo Andreas,
danke für die schnelle Antwort.
Die Idee mit dem Motoren auf dem Modelbau hatte ich auch schon. Doch ist es in der Tat sehr schwer etwas vernünftiges zu finden. Ich hatte diesen Motor in die engere Auswahl genommen aber ich denke das der überdimensioniert ist. http://www.ebay.de/itm/900KV-4240-B...437824410?pt=RC_Modellbau&hash=item27aee2cf9a Mit 890 KV ergibt sich dann eine max. Drehzahl von 21360 u/min und die 600 Watt wird den Akkus auch nicht gut tun. Was die Mähzeit angeht. Die 5mm Welle ist aber denke ich schon ganz gut. Naja ich habe ja noch ein bisschen Zeit und werde noch weiter suchen.
Irgendwoh hier im Forum hatte ich gelesen das naneona, der den Rotenbach umgebaut hat, auch auf einen Motor umstellen will. Ich bin gespannt wie er das lösen wird.
Gruß
Stephan
danke für die schnelle Antwort.
Die Idee mit dem Motoren auf dem Modelbau hatte ich auch schon. Doch ist es in der Tat sehr schwer etwas vernünftiges zu finden. Ich hatte diesen Motor in die engere Auswahl genommen aber ich denke das der überdimensioniert ist. http://www.ebay.de/itm/900KV-4240-B...437824410?pt=RC_Modellbau&hash=item27aee2cf9a Mit 890 KV ergibt sich dann eine max. Drehzahl von 21360 u/min und die 600 Watt wird den Akkus auch nicht gut tun. Was die Mähzeit angeht. Die 5mm Welle ist aber denke ich schon ganz gut. Naja ich habe ja noch ein bisschen Zeit und werde noch weiter suchen.
Irgendwoh hier im Forum hatte ich gelesen das naneona, der den Rotenbach umgebaut hat, auch auf einen Motor umstellen will. Ich bin gespannt wie er das lösen wird.
Gruß
Stephan
Roger schrieb:...
ich bitte mal um eure Meinung:
Da ich auch auf einen bürstenlosen Mähmotor umsteigen möchte, suche ich ebenfalls noch einen stromsparenden Motor mit ausreichender Leistung.
Was haltet ihr von diesem Motor:
Brushless DCMotor 45BL-02,
24 V, 35 W
4300/3600 rpm
8mm Welle
275 Yuan = 34 Euro, ist das richtig?
Hallo Roger,
der Kurs scheint richtig, dies hier ist wohl derselbe Motor für 163 USD ( Link ).
Deine Daten scheinen aber nicht ganz zu passen (bei mir steht 36V, 50W). Ob 50W reichen kann ich nicht beurteilen, könnte aber für kleinere Messer hinhauen (zum Vergleich: mein kleiner Ambrogio hat einen 120W Brushed Motor drin - mit einem "großem" Messer von 25cm Durchmesser ).
Mit der Plattform habe ich keine Erfahrungen (gibt es den Link auch auf Englisch? ;-))
Gruss,
Alexander
Zuletzt bearbeitet von einem Moderator:
nero76 schrieb:Gibt jetzt ein Schaltbild vom Gesamtprojekt:
http://grauonline.de/wordpress/wp-content/uploads/ardumower_schematics.png
Hallo nero76,
wenn ich mich nicht Irre hat sich in deinen Übersichtsplan ein Fehler eingeschlichen.
Beim Bandpass hast du "ADC.. und D.." (Eingang und Ausgang) vertauscht
Gruß Peter
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/928/hc0a6eab.PNG/
{kind=link}
Zuletzt bearbeitet von einem Moderator:
DG9BBQ schrieb:Hallo nero76,
wenn ich mich nicht Irre hat sich in deinen Übersichtsplan ein Fehler eingeschlichen.
Beim Bandpass hast du "ADC.. und D.." (Eingang und Ausgang) vertauscht
Hallo Peter,
vielen Dank für Deinen Beitrag! Ich habe das Schaltbild korrigiert.
Gruss,
Alexander
Zuletzt bearbeitet von einem Moderator:
AlexanderG schrieb:Hendrik schrieb:Ein Schaltbild ist hier zu finden.
Hallo Alexander, der Link ist verstorben…
Gruß Hannes
Zuletzt bearbeitet von einem Moderator:
@Hannes: das Schaltbild steht nun ganz offiziell auf der Webseite des Projektes:
http://www.ardumower.de/index.php/de/anleitungen/steuerung-software-schaltbild-teile
bzw. http://www.ardumower.de/images/ardumower_schematics.png
Gruss,
Alexander
http://www.ardumower.de/index.php/de/anleitungen/steuerung-software-schaltbild-teile
bzw. http://www.ardumower.de/images/ardumower_schematics.png
Gruss,
Alexander