Hi,
When I do the motor test (->d ->1) and the odometrie (->d ->2) in the serial console, everything goes well. Wheels are turning like they should...
But, when I use the arduremote or the pfod, my robot acts crazy...
see video (and results in serial console) in attachement.
When I push "Mower is on" or "mower is off", in the arduremote, the mower motor (no odometrie) is acting normal.
I have:
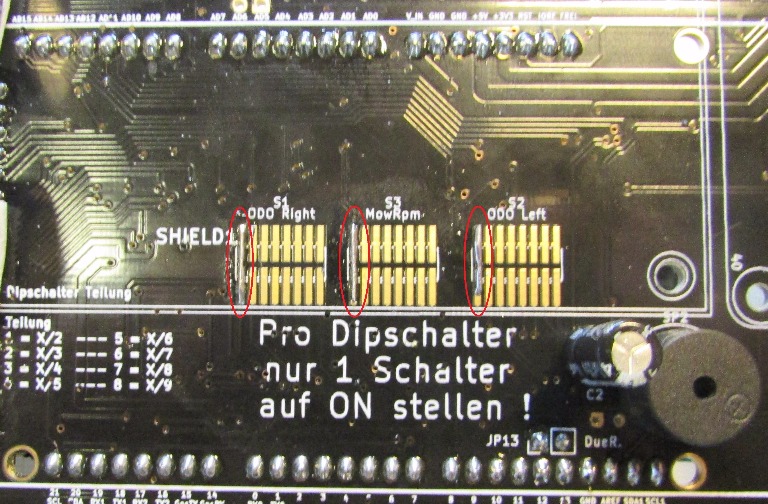
PCB 1.3
Arduino DUE
Azurit 1.0a7
2 wheel motors from the Marotronics shop. (connected the black, green and blue wire, not the purple)
I did not do the workaround rev. 20150607 (with capacitor, ELKO and so...)
Is this an Arduremote problem?
Odometrie problem?
Azurit 1.0a7 problem?
Something else?

Full video on: https://youtu.be/rO52XwTGe3g
Thanks for the help, greetz, Peter
When I do the motor test (->d ->1) and the odometrie (->d ->2) in the serial console, everything goes well. Wheels are turning like they should...
But, when I use the arduremote or the pfod, my robot acts crazy...
see video (and results in serial console) in attachement.
When I push "Mower is on" or "mower is off", in the arduremote, the mower motor (no odometrie) is acting normal.
I have:
PCB 1.3
Arduino DUE
Azurit 1.0a7
2 wheel motors from the Marotronics shop. (connected the black, green and blue wire, not the purple)
I did not do the workaround rev. 20150607 (with capacitor, ELKO and so...)
Is this an Arduremote problem?
Odometrie problem?
Azurit 1.0a7 problem?
Something else?
Full video on: https://youtu.be/rO52XwTGe3g
Thanks for the help, greetz, Peter
")


{kind=link}
{kind=link}
{kind=link}