Hallo,
ich habe das Problem, dass mein Ardumower ab und zu "die Kontrolle verliert". Er fährt stur gerade aus, reagiert nicht mehr auf die Perimeterschleife und lässt sich auch nicht mehr über die App steuern. Ich bekomme zwar in der pfodApp die Anzeige "connected", es wird aber kein Menü geschickt.
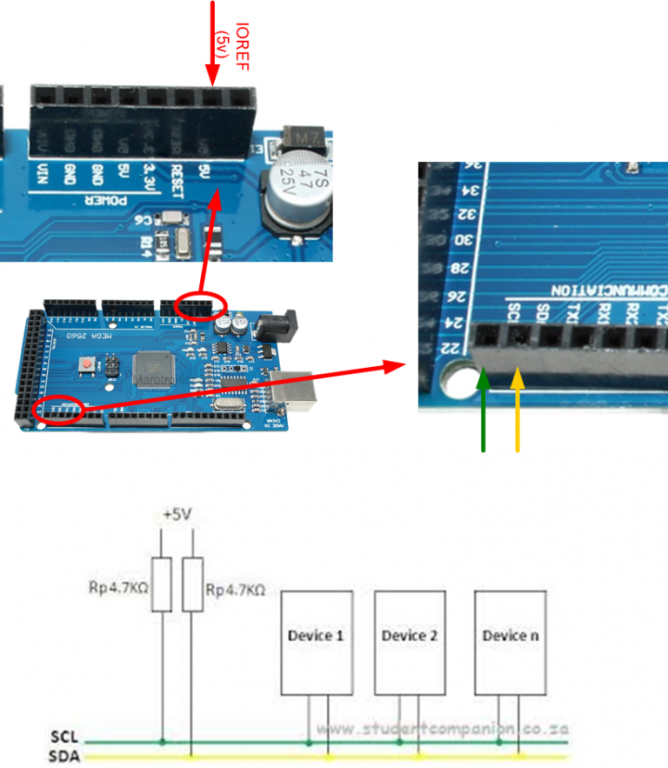
Über einen TimerInterrupt konnte ich feststellen, dass das Hauptprogramm in der IMU Klasse festhängt. Ich verwende das Release 1.0a7. Jetzt ist es ja so, dass seit dem an der imu.cpp noch ein bisschen geschraubt wurde. Unter anderem wurde der Hinweise: "WARNING Mega2560: it is recommended to upgrade to the Due as the Mega often hangs with this gyro!" hinzugefügt, später geändert zu "WARNING Mega2560: you may have to add 4k7 resistors (pull-ups) between SDA, SCL and IOREF for proper I2C bus".
Das riecht mir doch sehr stark danach als wäre das die Lösung zu meinem Problem. So nun zu meiner Frage: Wo muss ich da welche Widerstände genau dazwischen packen.
Sorry, wenn die Frage trivial ist, aber ich bin Softwareentwickler, kein E-Techniker.
Arudino: Mega 2560
PCB: 1.2
Gyro: GY-801
Vielen Dank schon mal.
ich habe das Problem, dass mein Ardumower ab und zu "die Kontrolle verliert". Er fährt stur gerade aus, reagiert nicht mehr auf die Perimeterschleife und lässt sich auch nicht mehr über die App steuern. Ich bekomme zwar in der pfodApp die Anzeige "connected", es wird aber kein Menü geschickt.
Über einen TimerInterrupt konnte ich feststellen, dass das Hauptprogramm in der IMU Klasse festhängt. Ich verwende das Release 1.0a7. Jetzt ist es ja so, dass seit dem an der imu.cpp noch ein bisschen geschraubt wurde. Unter anderem wurde der Hinweise: "WARNING Mega2560: it is recommended to upgrade to the Due as the Mega often hangs with this gyro!" hinzugefügt, später geändert zu "WARNING Mega2560: you may have to add 4k7 resistors (pull-ups) between SDA, SCL and IOREF for proper I2C bus".
Das riecht mir doch sehr stark danach als wäre das die Lösung zu meinem Problem. So nun zu meiner Frage: Wo muss ich da welche Widerstände genau dazwischen packen.
Sorry, wenn die Frage trivial ist, aber ich bin Softwareentwickler, kein E-Techniker.
Arudino: Mega 2560
PCB: 1.2
Gyro: GY-801
Vielen Dank schon mal.
{kind=link}