Hallo,
eigentlich sollte der Mower diese Saison durch mein Chassis-Eigenbau beerbt werden. Das hat bisher noch nicht funktioniert, so dass ich das alte Chassis weiter umgebaut habe.
Folgendes wurde gemacht:
- Zwei Bleiakkus durch einen Li-Ion Akku (7s3p) getauscht
- PCB 1.2 mit Mega durch PCB 1.3 mit Due getauscht
- Dabei auch die bisherigen
Motortreiber (LS298N und MOSFET für Mähmotor) durch MC... Treiber getauscht
- neue Halterungen für Ultraschall und Kamera erstellt
- Ladekontakte vom Bumper entfernt und oben drauf gesetzt
- Umbau von zwei Mähmotoren mit kleinen Scheiben zu einem Mähmotor mit Automower Scheibe
Das ganze sieht nun so aus:
Hinten sieht man, dass das bisherige Original-Bedienfeld entfernt wurde. Hier ist nun Platz für den Notaus, Hauptschalter und Taster zum Einschalten. Außerdem ist hier auch die Kontrollleuchte der Ladekontakte. Die Ladekontakte sind an der Oberseite so weit wie möglich nach Außen gesetzt. Es handelt sich dabei um einfache Messing-Hutmuttern. Der große Turm vorne in der Mitte beinhaltet den mittleren US-Sensor und eine Webcam. Das grüne oben drauf ist der Regensensor. Rechts und links gibt es kleine Türmchen, die nur US-Sensoren beinhalten
Bei den gelben Teilen zwischen dem Chassis und den gedruckten Halterungen handelt es sich übrigens um selbstgebaute Silikondichtungen. Ich habe dazu gießfähiges 2K Silikon in selbstgedruckte Formen gegeben.
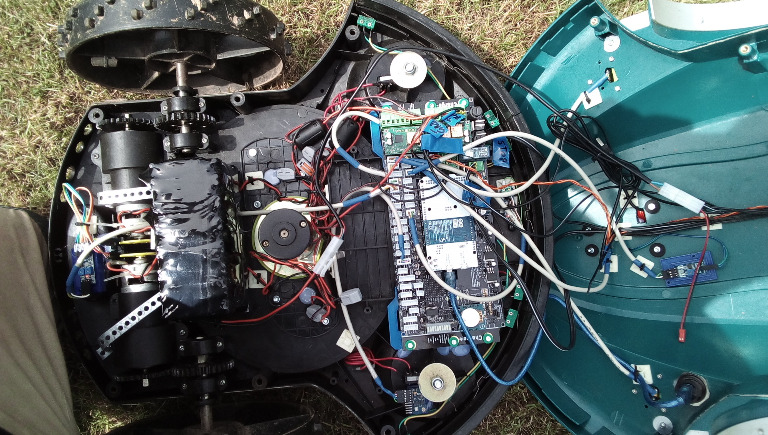
Von unten sieht es so aus
Die bisherigen Öffnungen für die beiden Mähmotoren wurden ebenfalls mit Silikondichtungen verschlossen. Die Mähscheibe ist mit einem selbstgrdruckten Flansch an der Motorwelle befestigt. Ich bin mir noch nicht sicher, ob es so bleibt. Die Lösung mit einem
Motor hat drei wesentliche Nachteile:
1. Durch Wegfall der beiden Bleiakkus und des einen Motors ist der Mower sehr leicht geworden. Besonders vorne ist nicht mehr viel Gewicht. An Hindernissen fährt er jetzt eher mal rauf
2. Bei dem Mähmotor handelt es sich um einen der ursprünglichen Motoren. Der zweite
Motor steckt in meinem Eigenbau, daher muss es hier einer richten. Dieser hat aber nicht genug Kraft, um im hohen Gras zu mähen. Als Folge wird der
Motor recht warm und der
Motortreiber hat bei dem aktuell sehr hohem Gras schon einige Male abgeschaltet. Jetzt wo das hohe Gras aber weg ist geht es besser.
3. Der Mähbereich ist um 3cm geschrumpft.
Immerhin sehen die Silikon-Stützräder vom letzten Jahr noch super aus. Klare Empfehlung an selbstgebaute Stützräder.
Innen ist es nun aufgeräumter. Die lose Verkabelung ist durch weniger lose Verkabelung ersetzt worden. Als Leitungen verwende ich Lapp Unitronic Kabel mit 4 Adern 0,25mm². Die lassen sich super crimpen und kostet auch nicht viel.
Wie hier zu sehen, sind alle Kabel vom Gehäusedeckel gebündelt und nach vorne geführt worden. Die Idee war, so die Gehäuseteile vernünftig öffnen zu können ohne viel Kabelsalat (hatte ich vorher).
Der Akku hat zwischenzeitig seine Position verlegt und befindet sich nun zwischen Mähmotor und Platine
Als Odometrie kommt wieder die Gabellichtschranke mit Scheiben an den Motorwellen zum Einsatz. Ich hoffe, dass dies nun mit dem Due klappt. IMU hat auch einen Platz gefunden, ist aber wie Odometrie noch nicht im Betrieb.
Zudem soll nun endlich der OrangePI seinen Platz finden. Dieser soll per WLAN das Kamerabild verfügbar machen und eine komfortable Steuerungsmöglichkeit bieten.
Der Kabelbaum am Chassisdeckel hat für gehörige Störungen im Perimeterempfänger gesorgt. Verursacht wird dies durch den DC/DC Wandler. Die Störungen werden über das Batteriekabel und das Kabel vom Not-Aus transportiert. Weil der Hauptschalter und Not-Aus am Deckel gefestigt sind, sind beide Kabel dicht am Empfänger vorbei gegangen, wenn das Gehäuse geschlossen ist. Zur Lösung habe ich den Empfänger eingetütet und mit Kupfer von oben abgeschirmt. Anbei ein zugegeben schlechtes Bild (die Kamera bekommt es nicht gut fokussiert). Man sieht hier den Empfänger von unten.
Nächste Schritte:
- Odometrie einrichten und einmessen
- IMU aktivieren
- Ladekontakte an Ladestation überarbeiten
- PI fertig machen, Code zur Kommunikation anpassen (RMCS)
Der letzte Punkt ist halb fertig. Ich werde berichten, sobald es was zum vorzeigen gibt.
Attachment:
https://forum.ardumower.de/data/media/kunena/attachments/2946/IMG_20180512_131016.jpg/")








{kind=link}
{kind=link}