Hallo,
erst mal möchte ich mich für die tolle Arbeit, die Ihr hier Leistet bedanken.
Markus dürfte ich ja schon kennen lernen ( hoffe die Platte hilft dir") )
)
Da auch ich keine Lust mehr hab den Rasen zu mähen, baue ich mir einen Mover.
Die Antriebe hab ich von einem Bekannten bekommen. War der Antrieb von einem Rollstuhl. Eigentlich wollte ich die
ganze Steuerung weiter verwenden aber nach dem ich die Seite hier gefunden habe, war es einfacher die Motoren an die Motorentreiber anzuschließen, anstatt erst mal raus zu finden wie das Funktioniert.
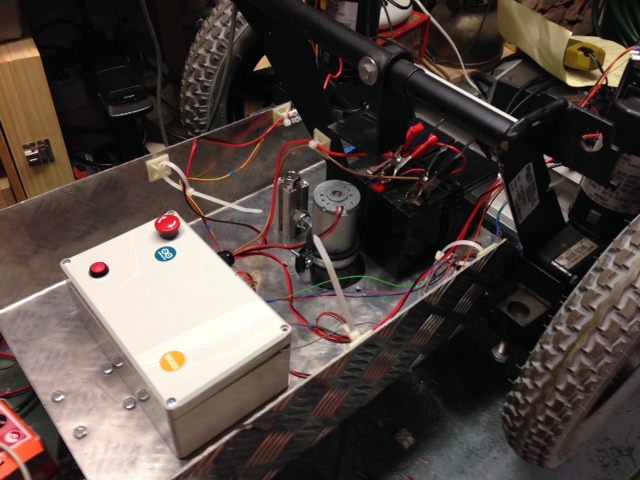
Das Fahrgestellt ist ertsmal zum testen Fertig. Ob die Lenkrolle reicht weiß ich noch nicht, könnte zu klein sein.
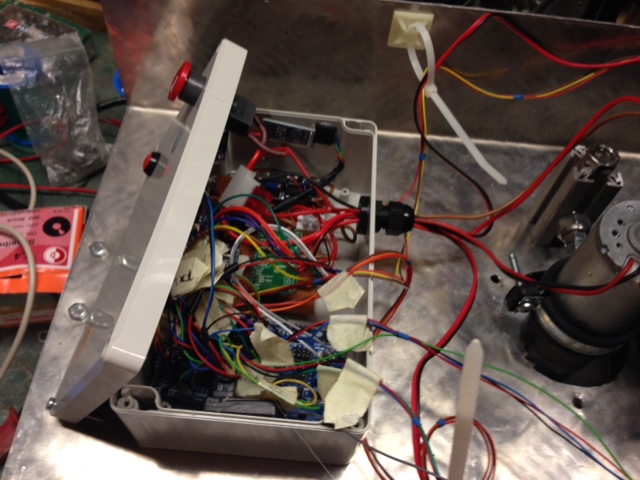
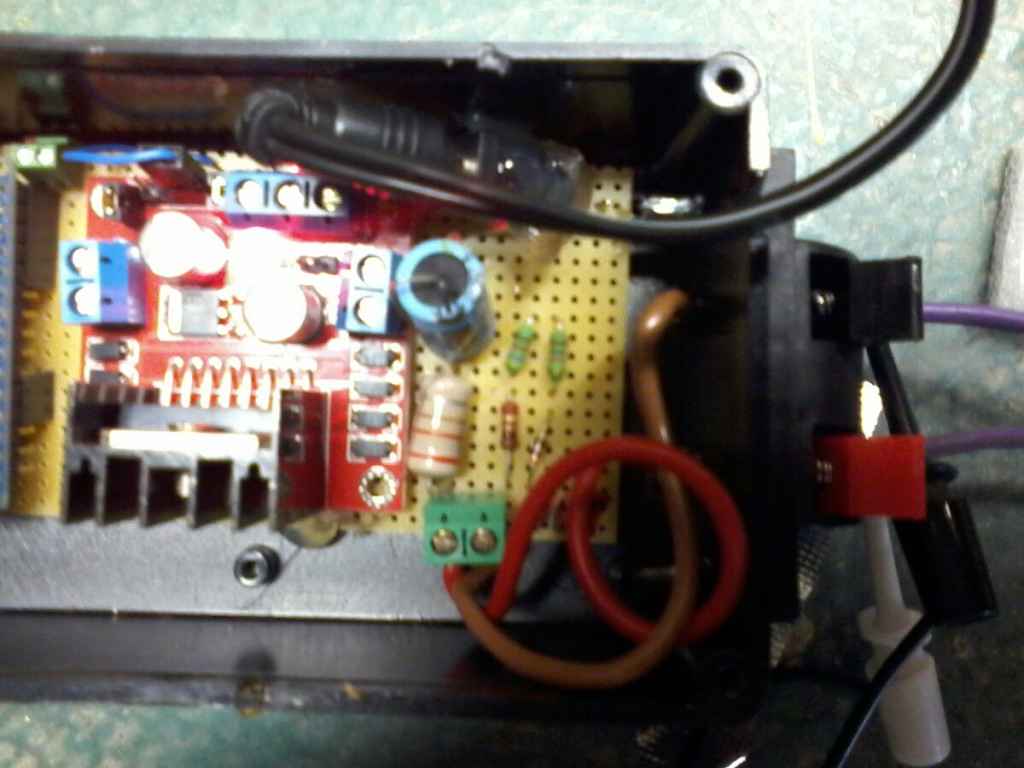
Die ganze Steuerung ist auch soweit zusammengebaut und wir heute angeschlossen und getestet. Leider hab ich bei den ersten tests mit dem step down regler nicht aufgepasst und einen Mega und GY-80 gegrillt
Ich hatte zu Glück noch einen Mega ADK rumliegen und der GY-80 wird deaktiviert und nachbstellt.
Hier mal ein paar Bilder von meinem Projekt.
Die Radsensoren werden heute noch angebaut. Es werden kleine Magnete ob an der Motorwelle angeklebt. Da das von einem Rollstuhl war, hatte er auf den Motoren Bremsen und dort ist ein super Platz dafür.
Der Mähmotor ist ein 12 V PKW Motor, mal sehen ob der es tut
Wenn die Platine fertig ist werde ich umbauen und auch die neue Software testen.
Was noch zu tun ist:
Bumper anbauen
testen, testen, testen
Verkleidung für alles

Stefan
erst mal möchte ich mich für die tolle Arbeit, die Ihr hier Leistet bedanken.
Markus dürfte ich ja schon kennen lernen ( hoffe die Platte hilft dir
)Da auch ich keine Lust mehr hab den Rasen zu mähen, baue ich mir einen Mover.
Die Antriebe hab ich von einem Bekannten bekommen. War der Antrieb von einem Rollstuhl. Eigentlich wollte ich die
ganze Steuerung weiter verwenden aber nach dem ich die Seite hier gefunden habe, war es einfacher die Motoren an die Motorentreiber anzuschließen, anstatt erst mal raus zu finden wie das Funktioniert.
Das Fahrgestellt ist ertsmal zum testen Fertig. Ob die Lenkrolle reicht weiß ich noch nicht, könnte zu klein sein.
Die ganze Steuerung ist auch soweit zusammengebaut und wir heute angeschlossen und getestet. Leider hab ich bei den ersten tests mit dem step down regler nicht aufgepasst und einen Mega und GY-80 gegrillt
Ich hatte zu Glück noch einen Mega ADK rumliegen und der GY-80 wird deaktiviert und nachbstellt.
Hier mal ein paar Bilder von meinem Projekt.
Die Radsensoren werden heute noch angebaut. Es werden kleine Magnete ob an der Motorwelle angeklebt. Da das von einem Rollstuhl war, hatte er auf den Motoren Bremsen und dort ist ein super Platz dafür.
Der Mähmotor ist ein 12 V PKW Motor, mal sehen ob der es tut
Wenn die Platine fertig ist werde ich umbauen und auch die neue Software testen.
Was noch zu tun ist:
Bumper anbauen
testen, testen, testen
Verkleidung für alles
Stefan
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}