Da ja die Motoren in meinem ersten Versuch viel zu Stark waren, bin ich dabei den Mower komplett neu zu bauen.
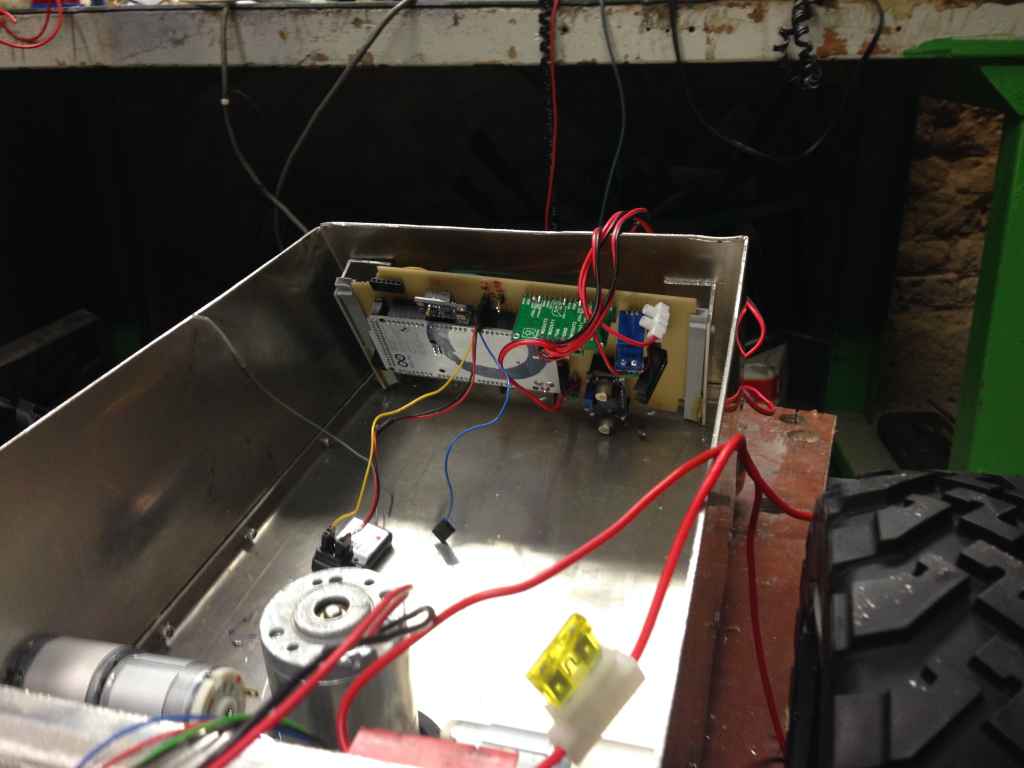
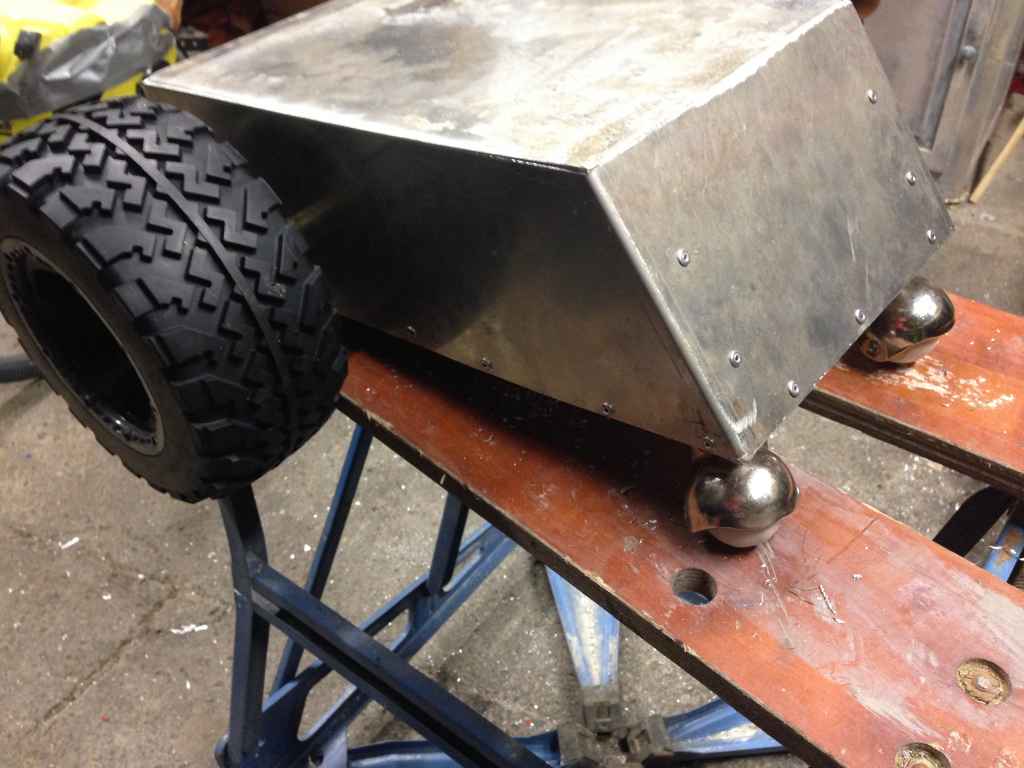
Gehäuse habe ich aus Alublech gebogen und Vernietet bzw verschraubt.
Das Bord hab ich vom alten übernommen und alles etwas kleiner gehalten.
Auf Motoren habe ich auf Modelcraft Motoren zurückgegriffen. Ich hoffe die haben genug Leistung.
Die Mechanik ist soweit fertig, bis auf die Bumper.
Jetzt geht es an die Verdrahtung.
Natürlich wird alles gleich auf die aktuelle SVN Version ausgelegt, damit ich die endlich testen kann.
Ob die Lenkrollen funktionieren, oder zu klein sind muss sich noch zeigen.
Hier ein paar Bilder.





Gehäuse habe ich aus Alublech gebogen und Vernietet bzw verschraubt.
Das Bord hab ich vom alten übernommen und alles etwas kleiner gehalten.
Auf Motoren habe ich auf Modelcraft Motoren zurückgegriffen. Ich hoffe die haben genug Leistung.
Die Mechanik ist soweit fertig, bis auf die Bumper.
Jetzt geht es an die Verdrahtung.
Natürlich wird alles gleich auf die aktuelle SVN Version ausgelegt, damit ich die endlich testen kann.
Ob die Lenkrollen funktionieren, oder zu klein sind muss sich noch zeigen.
Hier ein paar Bilder.
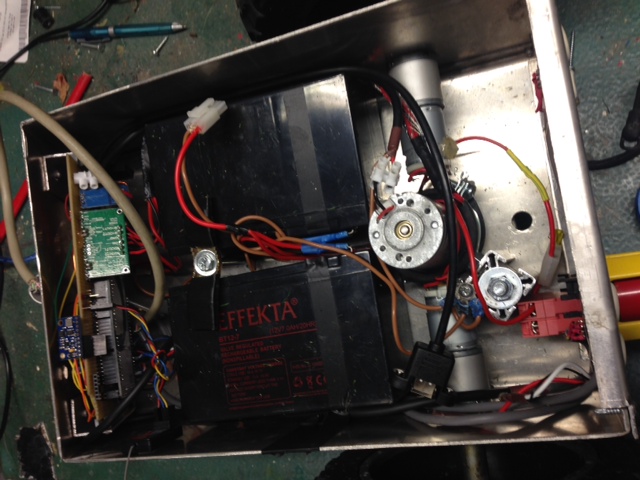
") Teilweise alte Serielle Kabel. Die Schirmung für die Spannungsversorgung ist von Antennenkabel abgezogen.
Teilweise alte Serielle Kabel. Die Schirmung für die Spannungsversorgung ist von Antennenkabel abgezogen.{kind=link}
{kind=link}