Wer hat Interesse an dem Umbau eines Saug- und Wisch Roboter auf eine Arduino-Steuerung
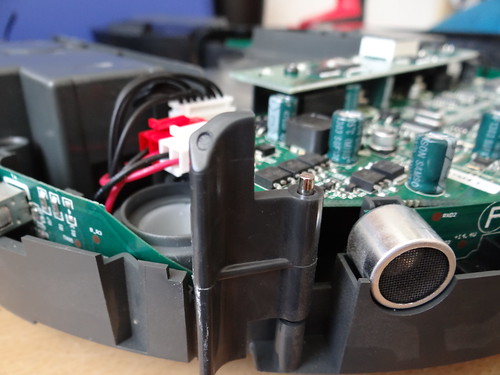
Es gibt sehr preiswerte Chassis als Grundlage und der Umbau gestaltet sich nicht besonders aufwändig. Vom Prinzip her ist alles dem ArduMower sehr ähnlich - nur erheblich einfacher z.B. der Mähmotor ist nun ein kleiner Saug-Motor.
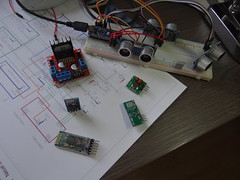
Zur Anwendung kommen "Ardumower"-bekannt Module:
- Arduino Nano V3.0
- DC-DC Wandler regelbar
- Motorendstufe L298
- FB-Empfänger
- ein Leistungs-Transistor für den Saug-Motor und einige Elektronik-Kleinteile.
Wer über die kalte Jahreszeit etwas Zeit hat - genau das Richtige B).
Bei Interesse einfach melden.
Es gibt sehr preiswerte Chassis als Grundlage und der Umbau gestaltet sich nicht besonders aufwändig. Vom Prinzip her ist alles dem ArduMower sehr ähnlich - nur erheblich einfacher z.B. der Mähmotor ist nun ein kleiner Saug-Motor.
Zur Anwendung kommen "Ardumower"-bekannt Module:
- Arduino Nano V3.0
- DC-DC Wandler regelbar
- Motorendstufe L298
- FB-Empfänger
- ein Leistungs-Transistor für den Saug-Motor und einige Elektronik-Kleinteile.
Wer über die kalte Jahreszeit etwas Zeit hat - genau das Richtige B).
Bei Interesse einfach melden.
")







{kind=link}