Hallo Freunde,
ich stelle hier ein eigenes Rasen Robot Projekt vor.
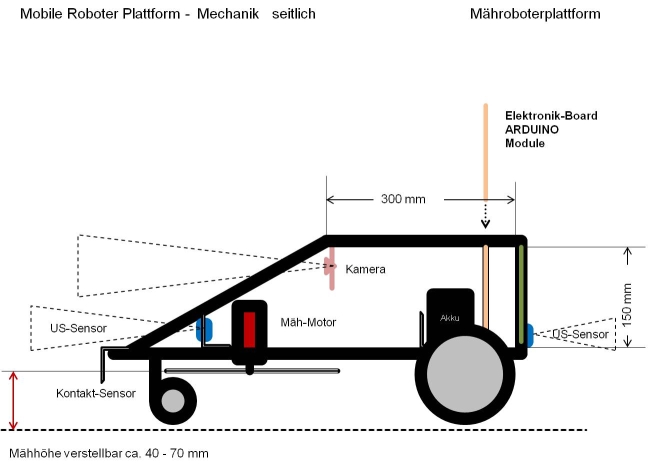
Der Schwerpunkt meiner Überlegungen und Versuche der letzten Monate war eine geeignete Mechanik und Elektrik für einen Mobilen Rasen Roboter als Plattform (MR2P) zu entwerfen und zu bauen. Die für die u.g. Anforderungen z.B. an Größe und Gesamtgewicht, sind praktisch alle derzeit verfügbaren Roboter-Plattformen entweder viel zu teuer (>1500,-€) oder nicht geeignet.
Die Konstruktion sollte gleich mehreren Anforderungen genügen:
- leicht, steife und robuste Konstruktion
- handelsübliche Konstruktionteile, preiswert und leicht nachzubauen
- universell einsetzbar, viel Platz für Versuche und Experimente
- sehr viel Platz für Elektrik und Elektronik
- möglichst auch noch "formschön"")
- Zuladung bis zu 6 kg
- Gesamtgewicht 8-10 Kg
- Maße 600x400x150 mm
Für die Elektrik + Elektronik eines Mobilen-Robot bzw. Rasen-Robot wurde von mir konsequent auf fertige, käufliche Module gesetzt. Auch hier musste, neben der Mechanik, auch das Elektronik-Board genug Platz für Versuche und Experimente bieten. Die Stomversorgung übernimmt z.Z. ein 12V 7,5 Ah Pb-Akku, später werden 1 bzw. 2 LiFePO4 Akkus eingebaut, die erheblich leichter sind.

Die Elektronik setzt auf den Arduino-Mega und benutzt ein spezielles sog. Top-Board um die IN-OUT-Pins des Prozessors sicher und zuverlässig mit den Modulen zu verbinden. Auch den Einsatz des Arduino DUE habe ich überlegt, das dann jedoch wegen der 3,3V Problematik wieder verworfen. Langfristig kann das Thema DUE dennoch wieder eine Rolle spielen - der Einsatz ist ja auch durchaus möglich.
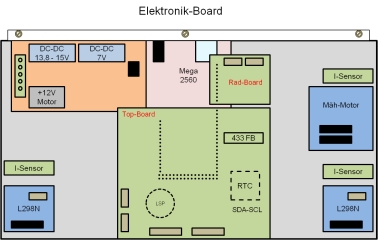
Die Verdrahtung der Module mit dem Top-Board wurde ausschliesslich mit bezugsfertigen Pfosten-Leisten und Buchsen-Stecker mit Kabelenden gelöst. Wenn die notwendigen Steckverbindungen festgelegt sind, wird es das Top-Board von mir als fertige Leiterplatte mit allen Anschlüssen geben. Diskret aufgebaut wurde nur der Spannungsteiler für die Akku-Spannungsmessung und der Lautsprecherausgang zur akustischen Signalisierung. Das gesamte Elektronikboard beinhaltet alle Module bis auf die US-Sensoren und ist durch die Steckverbindungen leicht von der Elektrik zu trennen. Das Board kann nach oben aus dem Rahmen herausgezogen werden. Die Anschlüsse der Spannungversorgung und zum Programmieren des Mega sind von oben zugänglich.
Aktuell befindet sich das Projekt in der Testphase für die Mechanik und Elektrik. Die Module und Elektronik mit dem Arduino-Mega wurde problemlos in Betrieb genommen und funktioniert sehr zuverlässig. Auch mit dem ersten Prototyp der Mechanik bin ich sehr zufrieden und stelle fest, dass eine Verkleinerung des Grundrahmens durchaus möglich gewesen wäre. Das Bedienfeld mit der Start-, Stop- und Home-Taste besitzt daneben noch ein I2C LCD-Display für 4 x 20 Zeichen. Eine andere Aufteilung und Erweiterungen am Bedienfeld sind jederzeit möglich.
Die Software für den Fahrbetrieb mit Start, Stop, Hinternisse umfahren, Rücksetzen und Wenden ist fertig. Auch hier teste ich z.Z. die allg. zur verfügungstehenden Arduino-Libraries auf Funktion und im Zusammenspiel mit anderen Lib's für die eingesetzten Fertig-Module.
Grundsätzlich lässt sich auch die hier im Forum z.V. stehende ArduMower-Software an meine Hardware anpassen.
Folgende Fertig-Module wurden bis heute, neben dem Arduino-Mega, einbaut:
[ul]
[li]Ultraschall-Sensor HC-SR04[/li]
[li]RTC- Modul mit RAM[/li]
[li]DC-DC-Wandler LM2596S[/li]
[li]MotorEndstufe PWM 10A[/li]
[li]MotorBrücke L298N[/li]
[li]433 MHz Receiver für FB[/li]
[li]LCD Display I2C 4x20[/li]
[li]Strom-Sensor ACS712[/li]
[/ul]
in Vorbereitung:
[ul]
[li]GPS-Modul[/li]
[li]CMUcam4[/li]
[li]Rasen-Sensor[/li]
[li]Schleifen-Sensor[/li]
[/ul]
Die vorliegende Konstruktion ist nicht auf die Anwendung eines Rasen-Roboters beschränkt und bietet ausreichend Platz und Möglichkeiten für andere Anwendungen. Ich bin auch gerne bereit Vorschläge zur Verbesserung der Mechanik oder Elektrik / Elektronik aufzunehmen, einzuarbeiten und zu testen.
Die Details zum Projekt wie Konstruktionszeichungen, Elektronik und Schaltpläne werden z.Z auf den aktuellen Stand gebracht. Bei Interesse an meinem Projekt bitte PN oder unter
Rainer-Rebhan.de
ich stelle hier ein eigenes Rasen Robot Projekt vor.
Der Schwerpunkt meiner Überlegungen und Versuche der letzten Monate war eine geeignete Mechanik und Elektrik für einen Mobilen Rasen Roboter als Plattform (MR2P) zu entwerfen und zu bauen. Die für die u.g. Anforderungen z.B. an Größe und Gesamtgewicht, sind praktisch alle derzeit verfügbaren Roboter-Plattformen entweder viel zu teuer (>1500,-€) oder nicht geeignet.
Die Konstruktion sollte gleich mehreren Anforderungen genügen:
- leicht, steife und robuste Konstruktion
- handelsübliche Konstruktionteile, preiswert und leicht nachzubauen
- universell einsetzbar, viel Platz für Versuche und Experimente
- sehr viel Platz für Elektrik und Elektronik
- möglichst auch noch "formschön"
- Zuladung bis zu 6 kg
- Gesamtgewicht 8-10 Kg
- Maße 600x400x150 mm
Für die Elektrik + Elektronik eines Mobilen-Robot bzw. Rasen-Robot wurde von mir konsequent auf fertige, käufliche Module gesetzt. Auch hier musste, neben der Mechanik, auch das Elektronik-Board genug Platz für Versuche und Experimente bieten. Die Stomversorgung übernimmt z.Z. ein 12V 7,5 Ah Pb-Akku, später werden 1 bzw. 2 LiFePO4 Akkus eingebaut, die erheblich leichter sind.
Die Elektronik setzt auf den Arduino-Mega und benutzt ein spezielles sog. Top-Board um die IN-OUT-Pins des Prozessors sicher und zuverlässig mit den Modulen zu verbinden. Auch den Einsatz des Arduino DUE habe ich überlegt, das dann jedoch wegen der 3,3V Problematik wieder verworfen. Langfristig kann das Thema DUE dennoch wieder eine Rolle spielen - der Einsatz ist ja auch durchaus möglich.
Die Verdrahtung der Module mit dem Top-Board wurde ausschliesslich mit bezugsfertigen Pfosten-Leisten und Buchsen-Stecker mit Kabelenden gelöst. Wenn die notwendigen Steckverbindungen festgelegt sind, wird es das Top-Board von mir als fertige Leiterplatte mit allen Anschlüssen geben. Diskret aufgebaut wurde nur der Spannungsteiler für die Akku-Spannungsmessung und der Lautsprecherausgang zur akustischen Signalisierung. Das gesamte Elektronikboard beinhaltet alle Module bis auf die US-Sensoren und ist durch die Steckverbindungen leicht von der Elektrik zu trennen. Das Board kann nach oben aus dem Rahmen herausgezogen werden. Die Anschlüsse der Spannungversorgung und zum Programmieren des Mega sind von oben zugänglich.
Aktuell befindet sich das Projekt in der Testphase für die Mechanik und Elektrik. Die Module und Elektronik mit dem Arduino-Mega wurde problemlos in Betrieb genommen und funktioniert sehr zuverlässig. Auch mit dem ersten Prototyp der Mechanik bin ich sehr zufrieden und stelle fest, dass eine Verkleinerung des Grundrahmens durchaus möglich gewesen wäre. Das Bedienfeld mit der Start-, Stop- und Home-Taste besitzt daneben noch ein I2C LCD-Display für 4 x 20 Zeichen. Eine andere Aufteilung und Erweiterungen am Bedienfeld sind jederzeit möglich.
Die Software für den Fahrbetrieb mit Start, Stop, Hinternisse umfahren, Rücksetzen und Wenden ist fertig. Auch hier teste ich z.Z. die allg. zur verfügungstehenden Arduino-Libraries auf Funktion und im Zusammenspiel mit anderen Lib's für die eingesetzten Fertig-Module.
Grundsätzlich lässt sich auch die hier im Forum z.V. stehende ArduMower-Software an meine Hardware anpassen.
Folgende Fertig-Module wurden bis heute, neben dem Arduino-Mega, einbaut:
[ul]
[li]Ultraschall-Sensor HC-SR04[/li]
[li]RTC- Modul mit RAM[/li]
[li]DC-DC-Wandler LM2596S[/li]
[li]MotorEndstufe PWM 10A[/li]
[li]MotorBrücke L298N[/li]
[li]433 MHz Receiver für FB[/li]
[li]LCD Display I2C 4x20[/li]
[li]Strom-Sensor ACS712[/li]
[/ul]
in Vorbereitung:
[ul]
[li]GPS-Modul[/li]
[li]CMUcam4[/li]
[li]Rasen-Sensor[/li]
[li]Schleifen-Sensor[/li]
[/ul]
Die vorliegende Konstruktion ist nicht auf die Anwendung eines Rasen-Roboters beschränkt und bietet ausreichend Platz und Möglichkeiten für andere Anwendungen. Ich bin auch gerne bereit Vorschläge zur Verbesserung der Mechanik oder Elektrik / Elektronik aufzunehmen, einzuarbeiten und zu testen.
Die Details zum Projekt wie Konstruktionszeichungen, Elektronik und Schaltpläne werden z.Z auf den aktuellen Stand gebracht. Bei Interesse an meinem Projekt bitte PN oder unter
Rainer-Rebhan.de

{kind=link}