Hello, I just build my first Ardumower PCB1.3. First big thanks to everyone contributing to this excelent open source project.
I am doing Azurit prescribed tests and have problem with odometry, which doesnt generate any impluses in my guess. I have bought everything from marotronics shop. First problem was that the engine has 4pin conector for pulse hall sensor counter. Onboard P8 and P9 is only 3 PIN. So I have connected red-brown, black-green, yellow-blue (output) and omitted purple on motor side.
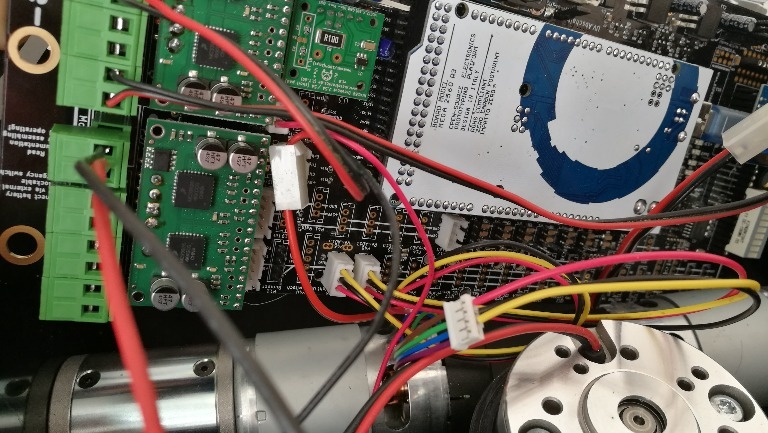
Motor test is working okay, but the odometry test (2 in console) has empty output which (I guess) is related to no impulse receiving.

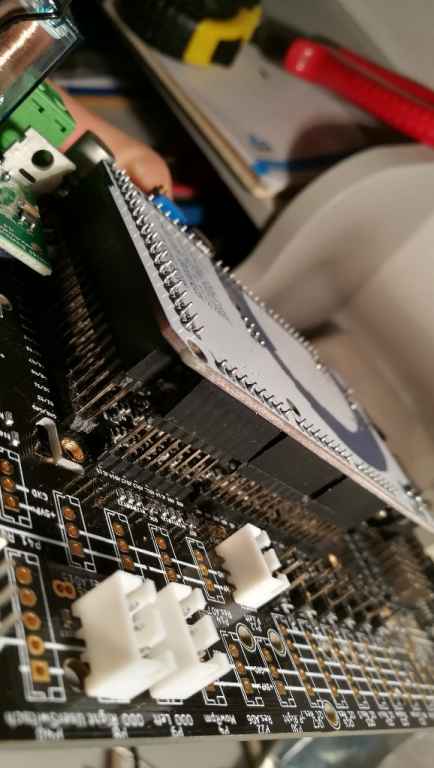
If I start the mottor and put voltmeter to data PIN of P8/P9, it shows 2,5V which I guess means the motor is generating impulses.
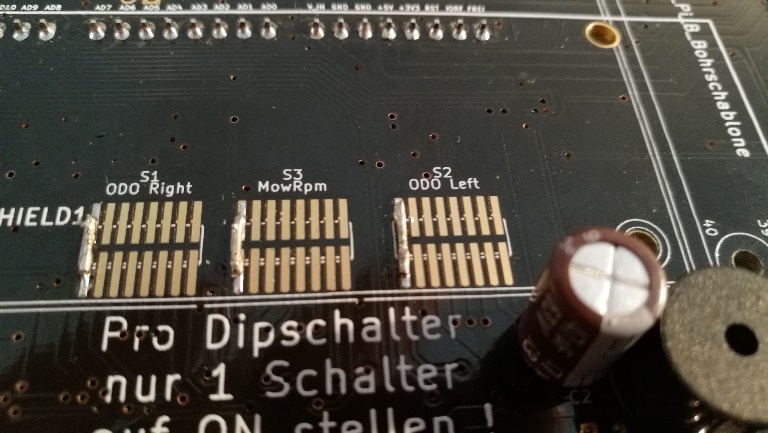
If I put the voltmeter on the output of U4/U9 in the ODO S1 botom PCB area it shows 0
Is the wirring okay?
Did anybody had simillar issue in the past?
Does anybody have idea what else to check?
Thank you
I am doing Azurit prescribed tests and have problem with odometry, which doesnt generate any impluses in my guess. I have bought everything from marotronics shop. First problem was that the engine has 4pin conector for pulse hall sensor counter. Onboard P8 and P9 is only 3 PIN. So I have connected red-brown, black-green, yellow-blue (output) and omitted purple on motor side.
Motor test is working okay, but the odometry test (2 in console) has empty output which (I guess) is related to no impulse receiving.
If I start the mottor and put voltmeter to data PIN of P8/P9, it shows 2,5V which I guess means the motor is generating impulses.
If I put the voltmeter on the output of U4/U9 in the ODO S1 botom PCB area it shows 0
Is the wirring okay?
Did anybody had simillar issue in the past?
Does anybody have idea what else to check?
Thank you
{kind=link}
{kind=link}