Ich stelle hier einige Konstruktionen von Rad-Antrieben vor.
Die PDF zeigt allg. wichtige Informationen hierzu und einen ersten Versuchsantrieb mit einem Stirnrad-Getriebe-Motor.

Mehrere Berechnungen und Versuche zeigen eine minimal notwendige Antriebsleistung d.h. Drehmoment (Getriebewelle) von 1 Nm pro Rad-Motor für einen ca. 6kg schweren Rasen Roboter. Die Geschwindigkeit sollte zwischen 0,25 und 0,5 m/Sek liegen. Bei 200mm Rad-Durchmesser sind an der Antriebsachse 25-50 U/Min notwendig. Die Antriebsachse sollte 2x kugelgelagert sein. Ich habe hier eine einfache und preiswerte Lösung gefunden.
Für eigene Berechnungen der Antriebsleistung - geht es hier zum RoboterNetz
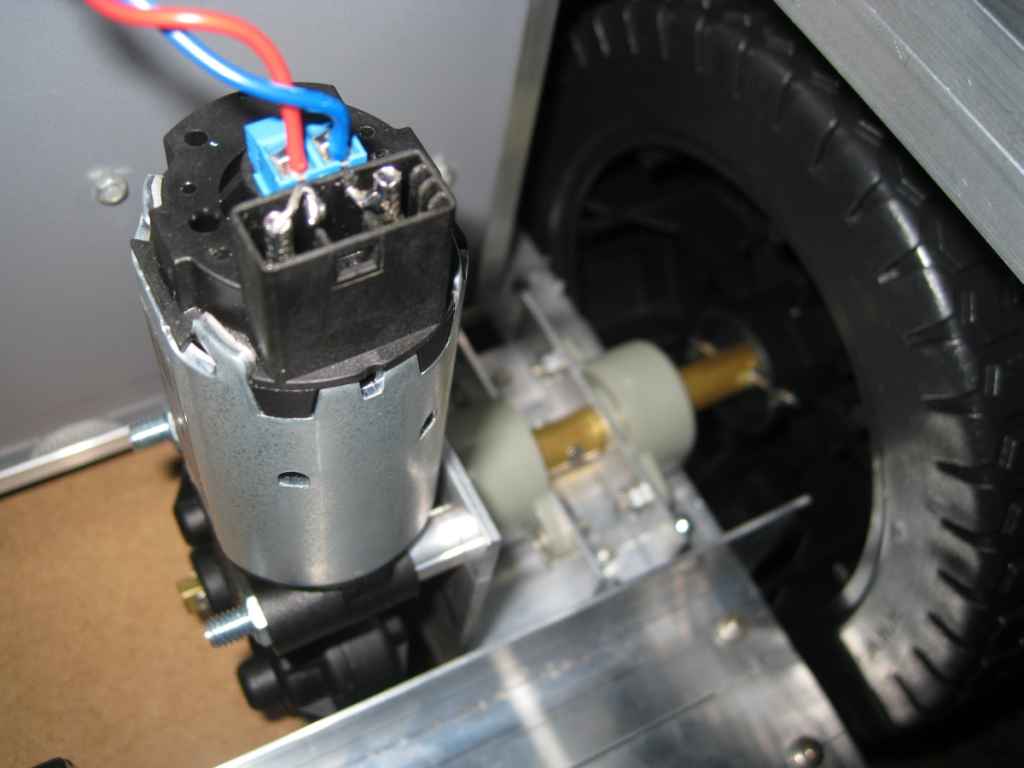
Rad-Antrieb mit einem Motor GMPD 404.980-1 (Fa.Pollin)

Rad-Antrieb mit einem Planeten-Getriebe-Motor.

Die PDF zeigt allg. wichtige Informationen hierzu und einen ersten Versuchsantrieb mit einem Stirnrad-Getriebe-Motor.
Mehrere Berechnungen und Versuche zeigen eine minimal notwendige Antriebsleistung d.h. Drehmoment (Getriebewelle) von 1 Nm pro Rad-Motor für einen ca. 6kg schweren Rasen Roboter. Die Geschwindigkeit sollte zwischen 0,25 und 0,5 m/Sek liegen. Bei 200mm Rad-Durchmesser sind an der Antriebsachse 25-50 U/Min notwendig. Die Antriebsachse sollte 2x kugelgelagert sein. Ich habe hier eine einfache und preiswerte Lösung gefunden.
Für eigene Berechnungen der Antriebsleistung - geht es hier zum RoboterNetz
Rad-Antrieb mit einem Motor GMPD 404.980-1 (Fa.Pollin)
Rad-Antrieb mit einem Planeten-Getriebe-Motor.