RonPeeters
Member
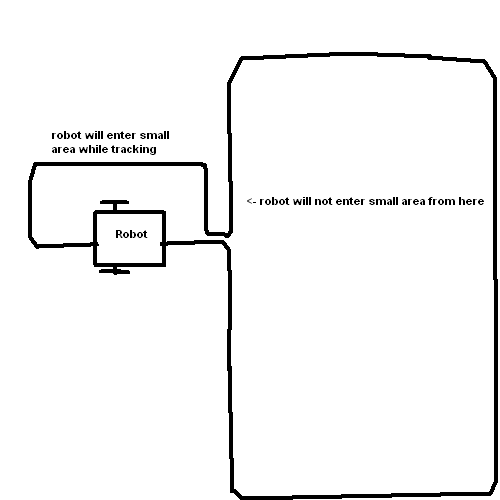
In the wiki about the perimeter wire an example is shown about dividing areas while using the perimeter wire.
Can someone explain to me how the robot would enter the small area and mow it?
The only reason (I can think of) why the robot would enter the small area, is when it is returning to the charging station.
So it would néver mow that area.
Or am I missing something here?
Can someone explain to me how the robot would enter the small area and mow it?
The only reason (I can think of) why the robot would enter the small area, is when it is returning to the charging station.
So it would néver mow that area.
Or am I missing something here?
")