Die Möglichkeit besteht durch aus käme aber auf ein Versuch darauf an.
Ich selber habe immer noch den Verdacht das ein IC ein defekt hat, wüste aber nicht wie man dasgenau finden soll.
Bisher ist der Fehler nur einmal aufgetreten gewesen hier im Forum das ein IC defekt war. Es hatte das defekte IC einfach ausgelötet gehabt und ein anderen Anschluss probiert. Soviel ich weiß hat er es auf gut Glück einfach die ICs nacheinander entfernt und dann immer dazwischen probiert.
Ich gebe dir aber recht bevor ich so was machen würde, würde ich erstmal auch ein oder 2 andere Module testen.
Da ich 4 Mower habe (1 großen zum fahren - einen zum testen wo ich basteln kann und 2 Mini Mower für die Wohnung aber ich die Möglichkeit bei Problemen einfach mal sie Module gegeneinander auszutauschen und damit den fehler einzugrenzen.
Aber du hast vermutlich mit einer Datenspannung von 5 Volt gearbeitet.
Der GY80 arbeitet aber mit einer auf der Datenleitung mit 3,3V deswegen hatte ich ja geschrieben den Jumper für die Datenspannung auf 3,3V zu stellen.
Hier mal der Schaltplan
Dort sieht man das das Vcc (5V) direkt an das IC1 geht dort werden aus dem 5V 3,3V gemacht. Die anderen ICs arbeiten alle mit 3,3V Versorgungsspannung
Links bei JP1 sieht man einmal die Lötpunkte und die Beschriftung Ex SCL und EX SDA
IN der Mitte bei IC6 sieht man wie die Datensignale von Außen auf 3,3V umgesetzt werden bezeichnet mit SDA und SCL
Die ganzen Datenleitungen arbeiten dann mit 3,3V
Ich selber benutze den IMU zur Zeit nicht. Er ist zwar aufgesteckt aber in den Einstellungen deaktiviert:
(Frage du hast doch den IMU zum testen eingeschaltet gehabt üben den Sketsch bzw der Handy APP?)
Es ist in der Azurit noch ein Fehler vorhanden der Sporadisch auftritt.
Der Fehler sorgt dafür das er wenn über die Perimeterschleife fährt Standard Mäßig Stoppen tut, zurück fährt , sich dreht und dann versucht wieder vorwärts zu fahren.
Ab und zu passiert es dann das der Mower sich andauert im Kreis dreht und damit dann nicht aufhört. Deswegen ist erbei mir deaktiviert.
Der IMU wird zur zeit nur dazu genutzt um möglichst gerade in einen Winkel zu fahren. Letztendlich macht es aber keinen Unterschied ob er gerade fährt oder krumm fährt.
Unser Programmierer arbeitet schon seit einiger Zeit an einer neuen Software (sunray). Dort ist es geplant eine Interne Landkarte zu erstellen und und möglischst genau
den Standort auf der Karte zu bestimmen. Damit soll es dann Möglich sein sein Rasen z.B in Bahnen zu mähen und die Landkarte soll dann erkennen wo er z.B schon war.
Das Problem dabei ist die Messwerte alle korrekt auszuwerten weil jeder Sensor Fehler Produzieren tut.
Der Alexander hat schon verschieden Kompassmodule z.B getestet und jedes Modul hat eine gewisse Ungenauigkeit die umso größer wird umso länger er in eine Richtung fährt.
Auch wird die Odemetrie dazu genutzt damit er wenn er gerade aus fahren tut kontrolliert das beide Räder sich gleich schnell drehen. Leider ist aber kaum eine genaue Verkennung möglich außer über den Kompass wenn z.B ein Rad nur kurzzeitig langsamer drehen tut. Dann ändert sich der Winkel. Drehen beide Räder mal durch ändert sich die zurückgelegte Strecke. Die Schwierigkeit liegt nun da drin festzustellen warum sich der Winkel geändert hat. GPS ist auch möglich ist aber zu ungenau. Man könnte mit einer GPS Bodenstation natürlich die natürlichen Schwankungen des GPS Signals erfassen , Aber man muss dann alle Möglichkeiten berücksichtigen. Auch ein 3D Laserscanner wird getestet. die Einfachen haben nicht die Genauigkeit und Reichweite und bei den guten Sensoren scheitert es am Preis.
Gruß
Uwe
Attachment:
https://forum.ardumower.de/data/media/kunena/attachments/1259/GY80-Schematic.jpg/ :angry:
:angry: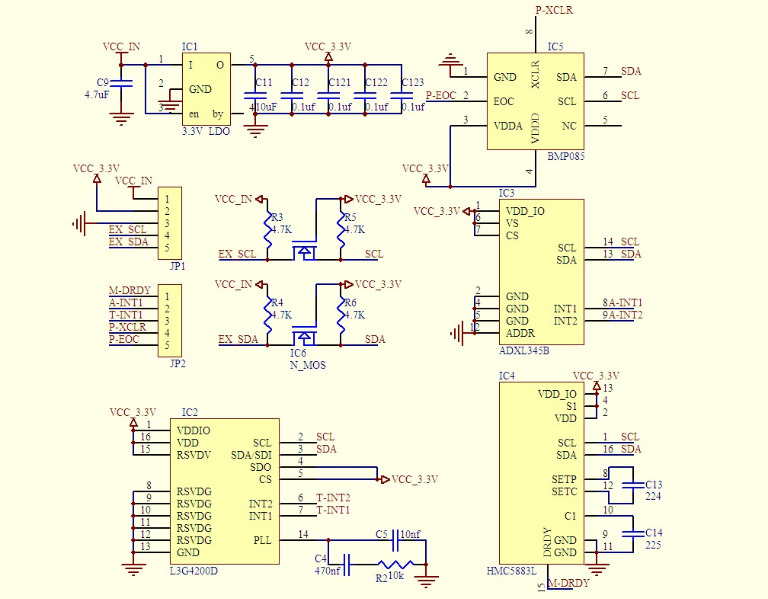
{kind=link}