hanoba
Member
Ich möchte jetzt auch einmal meinen ArduMower und die dazugehörige Firmware vorstellen. Ich habe ihn seit April 2021 erfolgreich in Betrieb.
Ich habe folgende Hardware-Konfiguration:
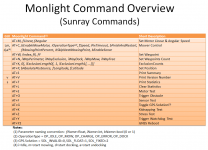
Ich verwende meine eigene "Moonlight" Firmware (ein Fork von Sunray v168) mit folgenden Erweiterungen:
Außerdem habe ich noch ein Python Kommandozeilen-Tool ("amcmd"), über das der ArduMower von der Kommandozeile über ssh gesteuert werden kann (siehe Bild).
Weitere Bilder und Videos folgen in Kürze.
Anhang anzeigen 5958




Ich habe folgende Hardware-Konfiguration:
- RTK mit eigener Basisstation
- PCB 1.3 mit Arduino Due
- Steckplatz für SD-Card
- IMU MPU6050
- Free-Wheel Sensor
- Bumperduino
- keine Sonar-Sensoren
- Schwarzes PE Gehäuse vom Januar 2021
- Deckel zweigeteilt, um einfachen Zugriff auf PCB zu ermöglichen
- Selbst gefräste Räder mit 30 cm Durchmesser
- Messer: 29cm 4-Zahn (Ambrogio L200)
- Heckantrieb
Ich verwende meine eigene "Moonlight" Firmware (ein Fork von Sunray v168) mit folgenden Erweiterungen:
- verbessertes Ausgabeformat für Logging
- kann Kommandos über UDP verarbeiten
- unterstützt Logging über UDP und auf SD-Card
- enthält einen Simulationsmodus, der mit einem Arduino Due + SD Card + ESP8266 + RTC arbeitet (für Software-Tests ohne Ardumower)
- unterstützt zusätzliche Kommandos (siehe Bild)
- unterstützt RTC (Logging Timestamp & SD Card File Date)
- Unterstützt SD-Card Filesystem Kommandos (ls, rm, cat, cp)
- Unterstützt Maps auf SD-Card
- Unterstützt Remote Control via UDP
- Kompatibel mit ArduMower Sunray-App (über Bluetooth)
- Wird über die Python-Programme "amcp" und "amcmd" gesteuert
Außerdem habe ich noch ein Python Kommandozeilen-Tool ("amcmd"), über das der ArduMower von der Kommandozeile über ssh gesteuert werden kann (siehe Bild).
Weitere Bilder und Videos folgen in Kürze.
Anhang anzeigen 5958
Anhänge
Zuletzt bearbeitet:



") ). Ist vielleicht auch für andere nützlich.
). Ist vielleicht auch für andere nützlich.








