Du verwendest einen veralteten Browser. Es ist möglich, dass diese oder andere Websites nicht korrekt angezeigt werden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Ladestation ohne Schleife finden
- Ersteller grave
- Erstellt am
Gibt es hierzu eine Lösung ?
Würde mich auch interessieren, da mein Mower jedesmal wenn er die Schleife langfahren will in Nachbar`s Garten gibt.
Hat mir diesmal seine Messer gekostet, und schiefstehende Aufnahmen für die Befestigungsschrauben.
Die Perimeterschleife nach weiter wegzulegen ungünstig, da der Mower wegen meiner ganz vorne liegenden Spule nur bis zum Draht mäht.
Viele Grüße
Olaf
Würde mich auch interessieren, da mein Mower jedesmal wenn er die Schleife langfahren will in Nachbar`s Garten gibt.
Hat mir diesmal seine Messer gekostet, und schiefstehende Aufnahmen für die Befestigungsschrauben.
Die Perimeterschleife nach weiter wegzulegen ungünstig, da der Mower wegen meiner ganz vorne liegenden Spule nur bis zum Draht mäht.
Viele Grüße
Olaf
markus-lbon-facebook
New member
Olaf schrieb:Die Perimeterschleife nach weiter wegzulegen ungünstig, da der Mower wegen meiner ganz vorne liegenden Spule nur bis zum Draht mäht.
Viele Grüße
Olaf
Du kannst via Arduremote auch eine Verzögerung einbauen. Er erkennt die Schleife aber Stoppt verzögert, ja nach eingestelltem Wert. So kann die Schleife auch etwas weiter weg vom Zaun.
Grüße Markus
Zuletzt bearbeitet von einem Moderator:
Hallo,
Ich denke über das gleiche Problem nach.
Könnte man das damit lösen? http://www.conrad.de/ce/de/product/...RSM2650-Betriebsspannung-5-V?ref=searchDetail
Stefan
Ich denke über das gleiche Problem nach.
Könnte man das damit lösen? http://www.conrad.de/ce/de/product/...RSM2650-Betriebsspannung-5-V?ref=searchDetail
Stefan
Hallo Stefan,
das ist ja "nur" ein Bewegungssensor, damit weiß der Mower aber immer noch nicht wo er oder die Ladestation ist. Es geht nur über direkte Navigation, oder er fährt auf einen Draht oder "Leitstrahl" entlang.
Im zweiten Weltkrieg gab es für die Navigation deutscher Bomber das sogenannte X-Verfahren, dabei wurden zwei versetzte Richtfunkstrahlen erzeugt, wobei der eine ein Morse Punkt und der andere ein Morsestrich sendete. Wenn der Pilot einen Dauerton hörte befand er sich auf Kurs, wenn er nur Strich oder Morse-Punkt hörte, jeweils rechts oder links daneben.
Ggf. könnte man nach dem Prinzip was machen, als Träger wären neben Funk, Licht(Laser) oder Ultraschall denkbar?
das ist ja "nur" ein Bewegungssensor, damit weiß der Mower aber immer noch nicht wo er oder die Ladestation ist. Es geht nur über direkte Navigation, oder er fährt auf einen Draht oder "Leitstrahl" entlang.
Im zweiten Weltkrieg gab es für die Navigation deutscher Bomber das sogenannte X-Verfahren, dabei wurden zwei versetzte Richtfunkstrahlen erzeugt, wobei der eine ein Morse Punkt und der andere ein Morsestrich sendete. Wenn der Pilot einen Dauerton hörte befand er sich auf Kurs, wenn er nur Strich oder Morse-Punkt hörte, jeweils rechts oder links daneben.
Ggf. könnte man nach dem Prinzip was machen, als Träger wären neben Funk, Licht(Laser) oder Ultraschall denkbar?
Hi,
Ich hätte den Bewegungssensor auf der Ladestation montiert damit die Station "weiß" wo der Roboter ist und ihn dann per RC quasi heimferngesteuert. Das Teil liefert Leistung und Richtung. An der Zu- bzw Abnahme der Leistung würde man auch sehen ob der Mower in die richtige Richtung (y-Achse) fährt. Mittels 2 auseinanderfolgenden Messungen könnte man eine Bewegungsrichtung in y-Achse und x-Achse errechnen. Schwierig wird es vermutlich wenn der Roboter in der Nähe der Station ist. Dann wird das Signal vmtl. ungenauer werden was die Richtung betrifft.
Das ganze kling absurd aber wenn ich dadurch Schleife und Sensoren spare?
Stefan
Ich hätte den Bewegungssensor auf der Ladestation montiert damit die Station "weiß" wo der Roboter ist und ihn dann per RC quasi heimferngesteuert. Das Teil liefert Leistung und Richtung. An der Zu- bzw Abnahme der Leistung würde man auch sehen ob der Mower in die richtige Richtung (y-Achse) fährt. Mittels 2 auseinanderfolgenden Messungen könnte man eine Bewegungsrichtung in y-Achse und x-Achse errechnen. Schwierig wird es vermutlich wenn der Roboter in der Nähe der Station ist. Dann wird das Signal vmtl. ungenauer werden was die Richtung betrifft.
Das ganze kling absurd aber wenn ich dadurch Schleife und Sensoren spare?
Stefan
Hallo Roland,
wo hast Du denn die Information mit dem Barcode her?") Der Neato macht m.E. doch einfach nur eine Korrelation der Distanzmessungen mit seiner Karte, mehr nicht. Dadurch weiss er wo er ist und wo er hin muss wenn er die Station aufsuchen möchte.
Der Neato macht m.E. doch einfach nur eine Korrelation der Distanzmessungen mit seiner Karte, mehr nicht. Dadurch weiss er wo er ist und wo er hin muss wenn er die Station aufsuchen möchte.
http://grauonline.de/wordpress/?page_id=779
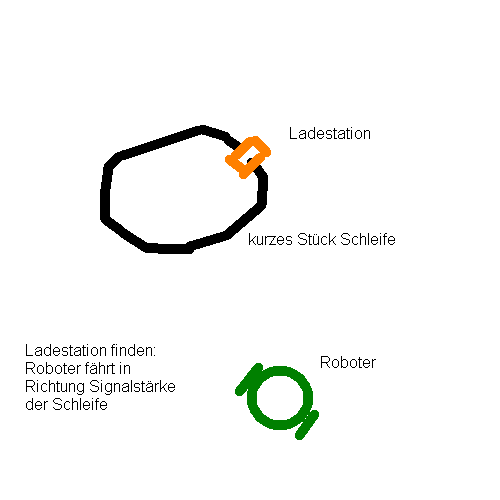
PS: Was man auch machen könnte wenn man keine komplette Schleife verlegen möchte: die Schleife nur im Umkreis der Ladestation verlegen. Die Schleife kann auch weiter weg davon geortet werden und dann muss man nur in Richtung der Signalstärke fahren:
Gruss,
Alexander
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/905/signalstaerke.png/
wo hast Du denn die Information mit dem Barcode her?
Der Neato macht m.E. doch einfach nur eine Korrelation der Distanzmessungen mit seiner Karte, mehr nicht. Dadurch weiss er wo er ist und wo er hin muss wenn er die Station aufsuchen möchte. http://grauonline.de/wordpress/?page_id=779
PS: Was man auch machen könnte wenn man keine komplette Schleife verlegen möchte: die Schleife nur im Umkreis der Ladestation verlegen. Die Schleife kann auch weiter weg davon geortet werden und dann muss man nur in Richtung der Signalstärke fahren:
Gruss,
Alexander
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/905/signalstaerke.png/
{kind=link}
Zuletzt bearbeitet von einem Moderator:
Hallo Alexander,
der Neato hat hinter dem Plastik an der Ladestation eine reflektierende unterteilte Fläche. Das habe ich grob als Barcode bezeichnet.
Ich vermute mal, das er diese nimmt um rückwärts anzudocken oder ggf. die Ladestation genau zu erkennen.
Ich werde auf ein ähnliches Problem treffen, wenn ich meine Ladestation baue. Da ich innerhalb der Schleife zur Ladestation fahre, benötige ich irgendwie eine Information, dass ich mich in der Nähe der Ladestation befinde. Dann wollte ich auf die Schleife fahren und in die Ladestation - wie der BigMow (mein großes Vorbild :woohoo: ). Falls da einer eine Idee hat oder sagen kann wie ich eine Barke realisiere wäre das super. Hab zwar schon Google des öfteren befragt, aber noch nichts richtiges gefunden. Eine zweite Schleife wollte ich nicht umsetzen.
der Neato hat hinter dem Plastik an der Ladestation eine reflektierende unterteilte Fläche. Das habe ich grob als Barcode bezeichnet.
Ich vermute mal, das er diese nimmt um rückwärts anzudocken oder ggf. die Ladestation genau zu erkennen.
Ich werde auf ein ähnliches Problem treffen, wenn ich meine Ladestation baue. Da ich innerhalb der Schleife zur Ladestation fahre, benötige ich irgendwie eine Information, dass ich mich in der Nähe der Ladestation befinde. Dann wollte ich auf die Schleife fahren und in die Ladestation - wie der BigMow (mein großes Vorbild :woohoo: ). Falls da einer eine Idee hat oder sagen kann wie ich eine Barke realisiere wäre das super. Hab zwar schon Google des öfteren befragt, aber noch nichts richtiges gefunden. Eine zweite Schleife wollte ich nicht umsetzen.