phuriousgeorge
New member
Hello, I've been stalking the forums, wiki and github for awhile now trying to determine the configuration and capabilities of the ardumower project compared with my needs and conceptual ideas I've been working. I recently identified a bit of information on the wiki that has me concerned with attempting to use 'supported' configurations.
I have 5 acres of land of which I only mow about 2 - 2.5 acres (8094 - 10117m2). I know with the random patterns of most robotic mowers out there, my only solution would be to split my property up in sub-sections and run multiple mowers. With the software enhancements I've seen that are in-progress with ardumower, I was hoping that the 'lane mowing' and positional tracking enhancements of Sunray could assist with efficiency, therefore allowing a small mower to handle a much larger area, even perhaps enhance later with scheduling the same mower to handle sub-portions of my lawn on certain days.
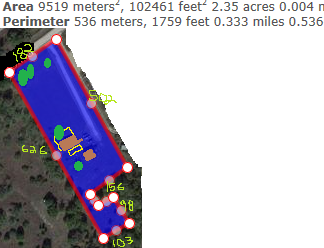
Unfortunately yesterday I read on the wiki that the perimeter wire maximums are a distance of 1476ft (450m) and area of .25 acres (1000m2). Is this a hard-stop, or is there hope for applying ardumower to my property?
I've been working through multiple concepts prior to finding the ardumower project and I am pleased and excited by it's progress and maturity. I've enjoyed the multiple documented experiments using various methods of positional tracking AlexanderG has been working with and glad he disproved their feasibility prior to me wasting my time on them")
I've attached an image of my mowed property with measurements. Please let me know your thoughts. I'd much rather invest more money into a single robot that can handle my whole property than buy or build multiple if feasible.
Also, does anyone have experience with using their ardumower in high temperature environments? I'm from Texas, USA so temperatures easily reach over 100F (37C) during a few months of the year.
I have 5 acres of land of which I only mow about 2 - 2.5 acres (8094 - 10117m2). I know with the random patterns of most robotic mowers out there, my only solution would be to split my property up in sub-sections and run multiple mowers. With the software enhancements I've seen that are in-progress with ardumower, I was hoping that the 'lane mowing' and positional tracking enhancements of Sunray could assist with efficiency, therefore allowing a small mower to handle a much larger area, even perhaps enhance later with scheduling the same mower to handle sub-portions of my lawn on certain days.
Unfortunately yesterday I read on the wiki that the perimeter wire maximums are a distance of 1476ft (450m) and area of .25 acres (1000m2). Is this a hard-stop, or is there hope for applying ardumower to my property?
I've been working through multiple concepts prior to finding the ardumower project and I am pleased and excited by it's progress and maturity. I've enjoyed the multiple documented experiments using various methods of positional tracking AlexanderG has been working with and glad he disproved their feasibility prior to me wasting my time on them
I've attached an image of my mowed property with measurements. Please let me know your thoughts. I'd much rather invest more money into a single robot that can handle my whole property than buy or build multiple if feasible.
Also, does anyone have experience with using their ardumower in high temperature environments? I'm from Texas, USA so temperatures easily reach over 100F (37C) during a few months of the year.