petercool_bln
New member
Hier mal meine Kleine Änderung am GPS für den Mover,
im Shop gibt es nur dieses GPS-Modul Neo -6M
Das hat jedoch einige Nachteile so werden nicht alle Sateliten Empfangen und es ist auch nicht so empfangsstark.
oft reichen schon ein Paar Blätter von Bäumen um den verlust eines oder mehr Satelieten zu erreichen.
aus diesem grund habe ich mir dieses GPS-Modul Neo -7M besorgt,
da es ein Neo-7M ist ist der Empfang doch Deutlich besser und damit auch die Genauigkeit der Positionsbestimmung.
dann hab ich in der gps.cpp folgendes geändert
die autrate auf 19200 hoch gesetzt.
jetzt wird das GPS-Modul noch etwas gepimmt.
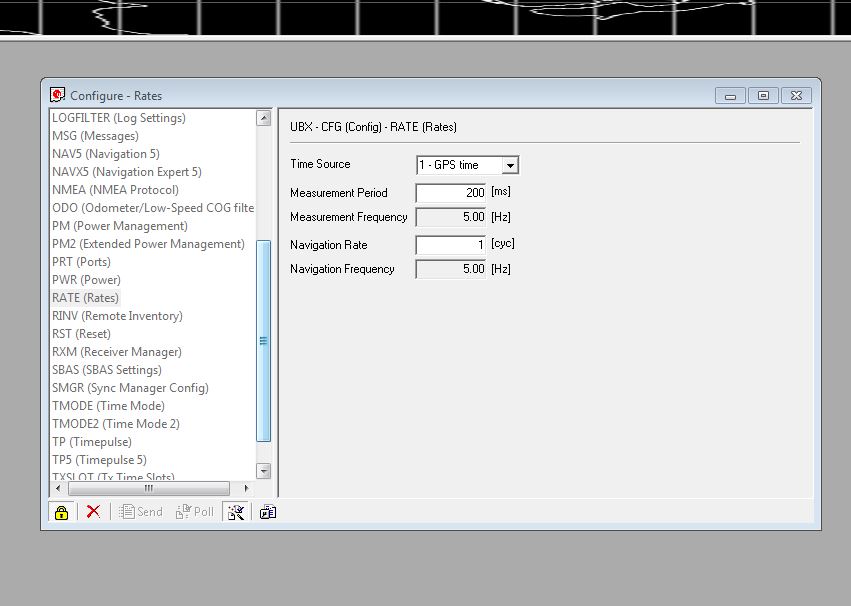
in der Grundeinstellung ist ja 1Hz als Messinterval eingestellt, was sicher zu einem Ergebnis führt aber wenn der Mower fährt ist er in einer Sekunde ja schon ganz wo anders.
Also U-Center auf und die Config des GPS-Moduls angepasst.

das ganze gespeichert und fertig is der GPS-Pimmp.
wenn man nun das ganze in der App anschaut ist sehr schön zu sehen das die Zahl der Satteliten meist bei 10-12 liegt auch unter ungünstigen Bedingungen.
auch ist die Position wesendlich genauer.
Testen beim Mähen konnte ich noch nicht da es hier in BW ja ständig regnet. ich werd3e euch aber mal auf dem laufenden halten.
Gruß Matthias
im Shop gibt es nur dieses GPS-Modul Neo -6M
Das hat jedoch einige Nachteile so werden nicht alle Sateliten Empfangen und es ist auch nicht so empfangsstark.
oft reichen schon ein Paar Blätter von Bäumen um den verlust eines oder mehr Satelieten zu erreichen.
aus diesem grund habe ich mir dieses GPS-Modul Neo -7M besorgt,
da es ein Neo-7M ist ist der Empfang doch Deutlich besser und damit auch die Genauigkeit der Positionsbestimmung.
dann hab ich in der gps.cpp folgendes geändert
Code:
//
// public methods
//
void GPS::init(){
Serial3.begin(9600);
}die autrate auf 19200 hoch gesetzt.
Code:
//
// public methods
//
void GPS::init(){
Serial3.begin(19200);
}jetzt wird das GPS-Modul noch etwas gepimmt.
in der Grundeinstellung ist ja 1Hz als Messinterval eingestellt, was sicher zu einem Ergebnis führt aber wenn der Mower fährt ist er in einer Sekunde ja schon ganz wo anders.
Also U-Center auf und die Config des GPS-Moduls angepasst.
das ganze gespeichert und fertig is der GPS-Pimmp.
wenn man nun das ganze in der App anschaut ist sehr schön zu sehen das die Zahl der Satteliten meist bei 10-12 liegt auch unter ungünstigen Bedingungen.
auch ist die Position wesendlich genauer.
Testen beim Mähen konnte ich noch nicht da es hier in BW ja ständig regnet. ich werd3e euch aber mal auf dem laufenden halten.
Gruß Matthias
") )
)