Hallo,
viele haben ja damit zu kämpfen, das die Signalstärke in der Mitte des Rasens zu gering ist. Die Umstellung der Raindancer Firmware auf ein 128Bit Signal hat schon eine gute Verbesserung gebracht. Eine weitere Massnahme ist,
den Sender umzubauen, dass dieser mehr als 1A zum senden verwendet. Doch dann gibt es zwei Faktoren zu berücksichtigen:
1) Es wird ziemlich viel Leistung im Sender verbraucht.
2) An engen Stellen oder auch direkt am Perimeter wird das Signal so stark, dass der Empfänger übersteuert und innen dann ggf. als außen erkannt wird.
Daher habe ich einen neuen Empfänger entwickelt der folgende Merkmale besitzt:
a) Es werden bis zu 4 Spulen unterstützt, wobei zwei Spulen gleichzeitig ausgewerte werden (z.B. zwei vorder Spulen). Der Empfänger kann dann bei Bedarf auf das andere Spulenpaar umgeschaltet werden.
Wenn nur eine Spule benötigt wird, müssen nur die Komponenten für eine Spule aufgelötet werden.
b) Das Sendersignal wird ca. 5ms lang und alle 46ms gesendet. Dazwischen ist der Ausgang des Senders deaktiviert. Damit belegt das Signal 11% der Sendeperiode.
c) AGC (Automatic Gain Control) Der Empfänger kann die Verstärkung runterregeln, wenn das empfangene Signal zu stark wird.
d) Die Empfangspulen werden mir RG174 Kabel an den Sender angeschlossen: Kabellänge maximal ca. 40cm.
Leider hat dies alles seinen Preis:
Die Samplingrate wurde auf 153kHz (bisher 38kHz) hochgesetzt.
Die Sendefrequenz wurde verdoppelt T=52us (bisher 104uS).
Es werden um die 80kByte Speicher benötigt um die ganzen Datenmengen zu verarbeiten.
Die Berechnung von 2 Spulen darf nicht länger als 53ms dauern. (Aktuell wird zur Ermittlung eines Signals 9x eine 2048 FFT ausgeführt und 9x eine 2048 IFFT)
Das ist aktuell mit dem DUE so nicht umzusetzen. Weiterhin ist dere aktuelle Empfänger nicht mehr geeignet.
Daher war es notwendig alles neu zu entwickeln.
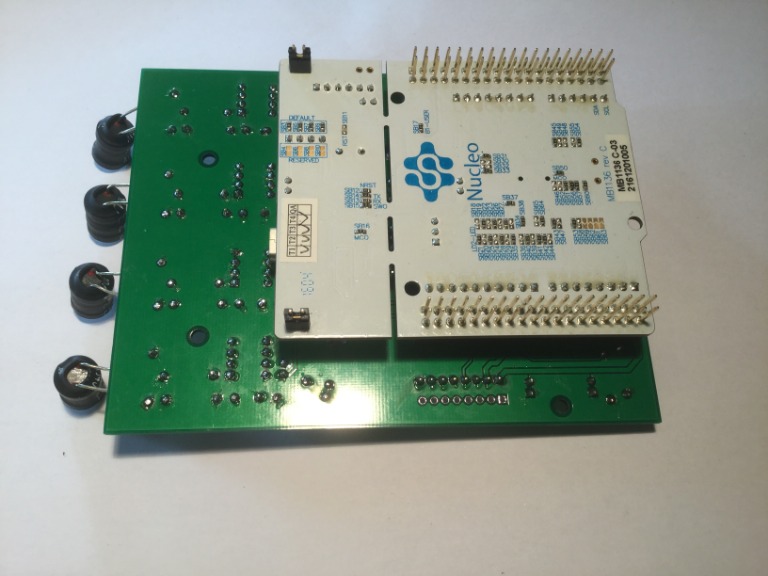
Ich verwende nun ein STM32 NUCLEO 446RE Entwicklungsboard.
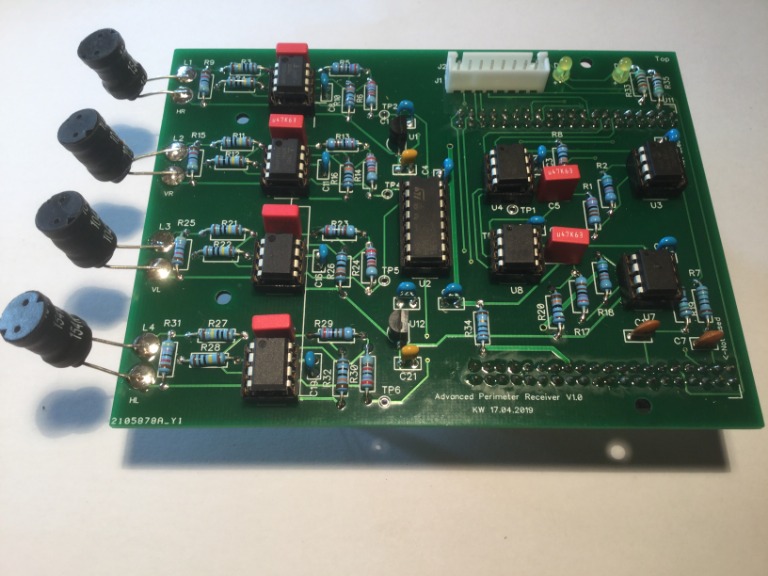
Der Empfänger wurde neu entwickelt. Alle Verstärker befinden sich nun auf einer Platine.
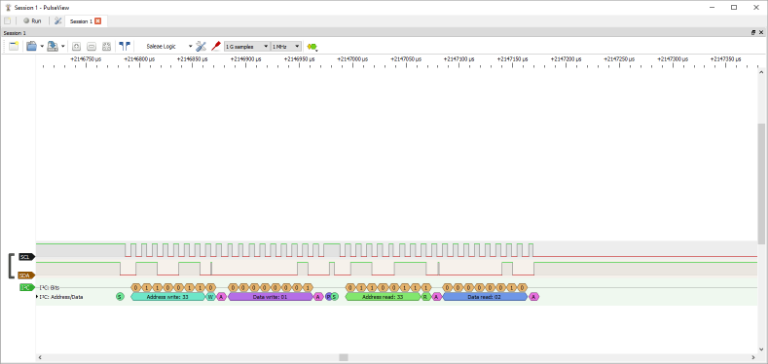
Das aktuelle PCB1.3 kann über I2C oder/und über die bisherigen Perimeteranschlüsse angeschlossen werden.
Im aktuellen Office Betrieb laufen die Tests bisher sehr gut. Nun muss ich das in der Praxis testen.
Da mein aktueller Robbi mäht, muss ich mir nun erstmal einen zweiten Testroboter aufbauen um auch die Raindancer Software abzuändern.
Anbei mal die ersten Bilder:
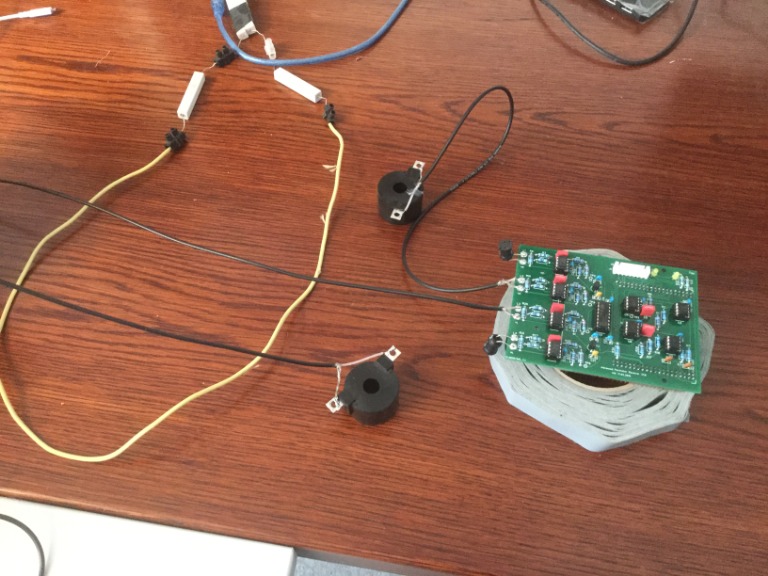
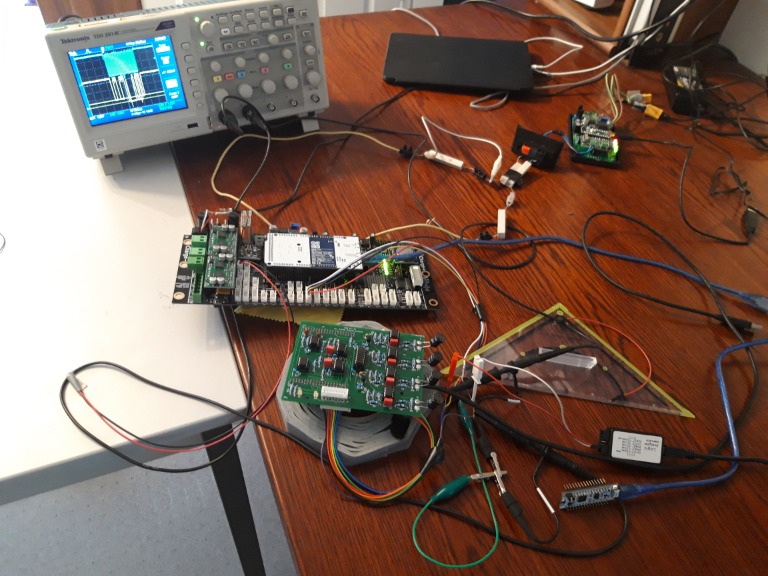
Platinen und Testumgebung:
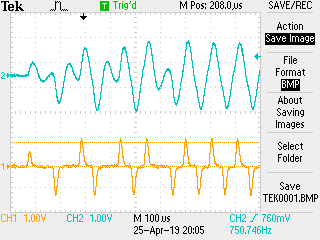
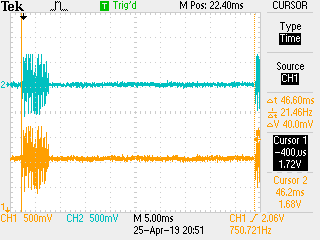
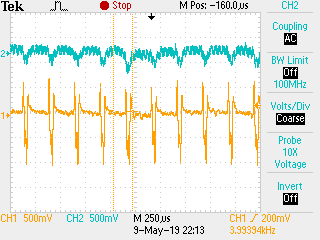
Signal am ADC des Nucleo Boards. Bei dem blauen Signal wurde die Spule an einem 5m langen RG174 Kabel angeschlossen. Dies ist zu lang. Bei dem gelben Signal wurde die Spule an einem 42cm langen RG174 Kabel angeschlossen. Dies ist OK.
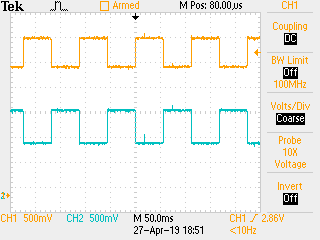
Sendeperiode:
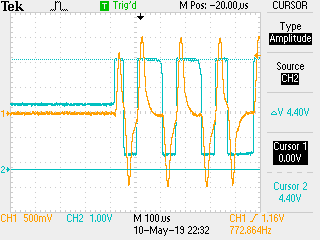
Signal am Perimeterreceivereingang des PCB1.3. Es gibt 3 Bereiche 0V = Signal ungültig. ca. 1.5V Außerhalb Perimeter. 3V Innerhalb Perimeter. Das Signal ist als Rechteck ausgebildet, so kann festgestellt werden, wann der Empfänger neue Daten hat (bei jedem Flankenwechsel ist eine neue Berechnung fertig). Weiterhin kann so festgestellt werden, ob der Empfänger noch arbeitet.
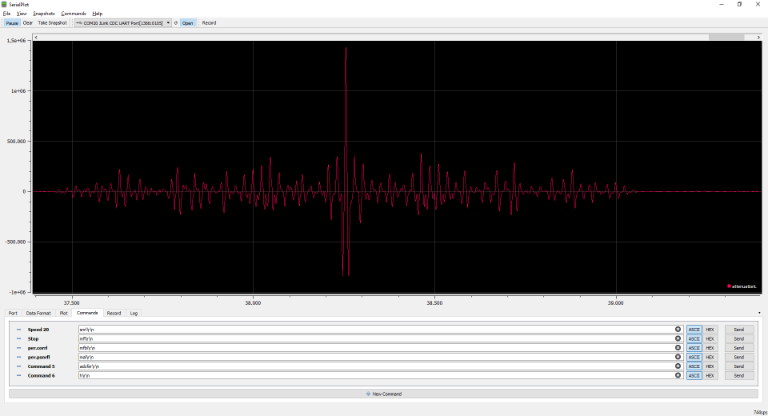
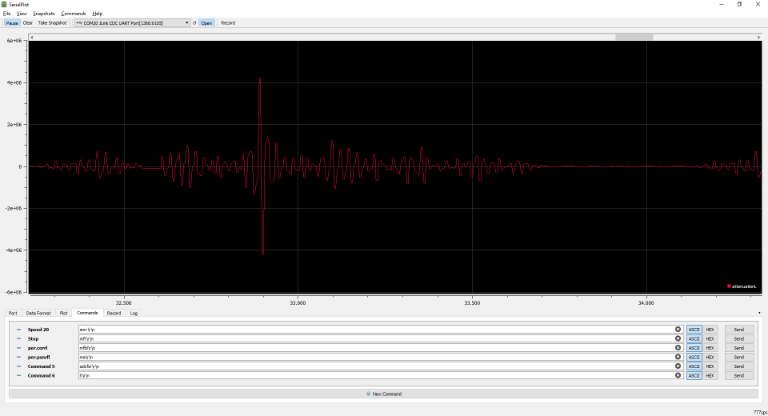
Matched Filter Output:
Signal Noise Ratio zur Auswertung
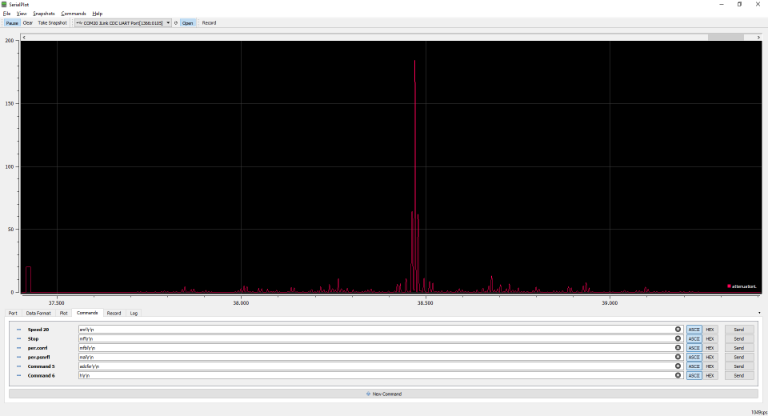
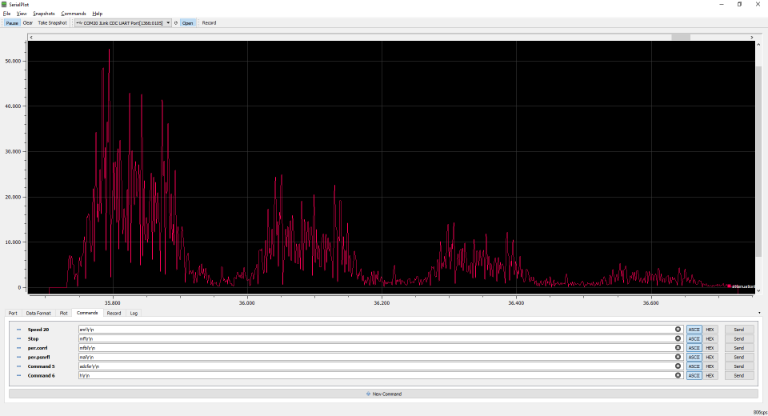
Amplituden Spekturm. Damit nicht um die 20 Bauteile für einen Antialiasing Filter zusätzlich eingelötet werden müssen, wurde als erster Operationsverstärker ein ICL 7621 verwendet. Der kostet 1,90€ und es wird für jede verwendete Spule einer benötigt. Dieser Dämpft die Frequenzen über 77khz um die 30dB. Ist zwar nicht so effektive wie ein Antialiasing Filter, hat aber den Vorteil, dass Bauteile eingespart werden konnten.
viele haben ja damit zu kämpfen, das die Signalstärke in der Mitte des Rasens zu gering ist. Die Umstellung der Raindancer Firmware auf ein 128Bit Signal hat schon eine gute Verbesserung gebracht. Eine weitere Massnahme ist,
den Sender umzubauen, dass dieser mehr als 1A zum senden verwendet. Doch dann gibt es zwei Faktoren zu berücksichtigen:
1) Es wird ziemlich viel Leistung im Sender verbraucht.
2) An engen Stellen oder auch direkt am Perimeter wird das Signal so stark, dass der Empfänger übersteuert und innen dann ggf. als außen erkannt wird.
Daher habe ich einen neuen Empfänger entwickelt der folgende Merkmale besitzt:
a) Es werden bis zu 4 Spulen unterstützt, wobei zwei Spulen gleichzeitig ausgewerte werden (z.B. zwei vorder Spulen). Der Empfänger kann dann bei Bedarf auf das andere Spulenpaar umgeschaltet werden.
Wenn nur eine Spule benötigt wird, müssen nur die Komponenten für eine Spule aufgelötet werden.
b) Das Sendersignal wird ca. 5ms lang und alle 46ms gesendet. Dazwischen ist der Ausgang des Senders deaktiviert. Damit belegt das Signal 11% der Sendeperiode.
c) AGC (Automatic Gain Control) Der Empfänger kann die Verstärkung runterregeln, wenn das empfangene Signal zu stark wird.
d) Die Empfangspulen werden mir RG174 Kabel an den Sender angeschlossen: Kabellänge maximal ca. 40cm.
Leider hat dies alles seinen Preis:
Die Samplingrate wurde auf 153kHz (bisher 38kHz) hochgesetzt.
Die Sendefrequenz wurde verdoppelt T=52us (bisher 104uS).
Es werden um die 80kByte Speicher benötigt um die ganzen Datenmengen zu verarbeiten.
Die Berechnung von 2 Spulen darf nicht länger als 53ms dauern. (Aktuell wird zur Ermittlung eines Signals 9x eine 2048 FFT ausgeführt und 9x eine 2048 IFFT)
Das ist aktuell mit dem DUE so nicht umzusetzen. Weiterhin ist dere aktuelle Empfänger nicht mehr geeignet.
Daher war es notwendig alles neu zu entwickeln.
Ich verwende nun ein STM32 NUCLEO 446RE Entwicklungsboard.
Der Empfänger wurde neu entwickelt. Alle Verstärker befinden sich nun auf einer Platine.
Das aktuelle PCB1.3 kann über I2C oder/und über die bisherigen Perimeteranschlüsse angeschlossen werden.
Im aktuellen Office Betrieb laufen die Tests bisher sehr gut. Nun muss ich das in der Praxis testen.
Da mein aktueller Robbi mäht, muss ich mir nun erstmal einen zweiten Testroboter aufbauen um auch die Raindancer Software abzuändern.
Anbei mal die ersten Bilder:
Platinen und Testumgebung:
Signal am ADC des Nucleo Boards. Bei dem blauen Signal wurde die Spule an einem 5m langen RG174 Kabel angeschlossen. Dies ist zu lang. Bei dem gelben Signal wurde die Spule an einem 42cm langen RG174 Kabel angeschlossen. Dies ist OK.
Sendeperiode:
Signal am Perimeterreceivereingang des PCB1.3. Es gibt 3 Bereiche 0V = Signal ungültig. ca. 1.5V Außerhalb Perimeter. 3V Innerhalb Perimeter. Das Signal ist als Rechteck ausgebildet, so kann festgestellt werden, wann der Empfänger neue Daten hat (bei jedem Flankenwechsel ist eine neue Berechnung fertig). Weiterhin kann so festgestellt werden, ob der Empfänger noch arbeitet.
Matched Filter Output:
Signal Noise Ratio zur Auswertung
Amplituden Spekturm. Damit nicht um die 20 Bauteile für einen Antialiasing Filter zusätzlich eingelötet werden müssen, wurde als erster Operationsverstärker ein ICL 7621 verwendet. Der kostet 1,90€ und es wird für jede verwendete Spule einer benötigt. Dieser Dämpft die Frequenzen über 77khz um die 30dB. Ist zwar nicht so effektive wie ein Antialiasing Filter, hat aber den Vorteil, dass Bauteile eingespart werden konnten.
") finally some use of the gps module
finally some use of the gps module {kind=link}
{kind=link}
{kind=link}