Hallo,
ich bin Toby, etwas über viezig und bin durch Zufall auf diesen "ArduMower" gestoßen.
Ich hoffe nicht, das ich jetzt von Euch "ausgelacht" werde. (Diese Seite hier war mir zuvor leider nicht bekannt)
Ardumower
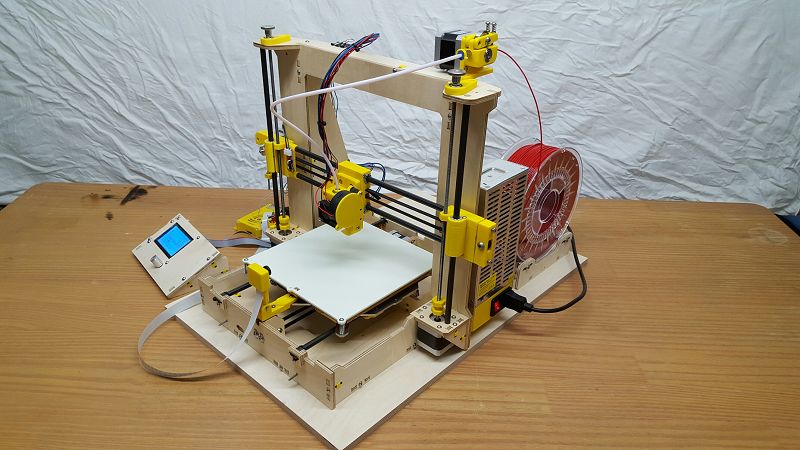
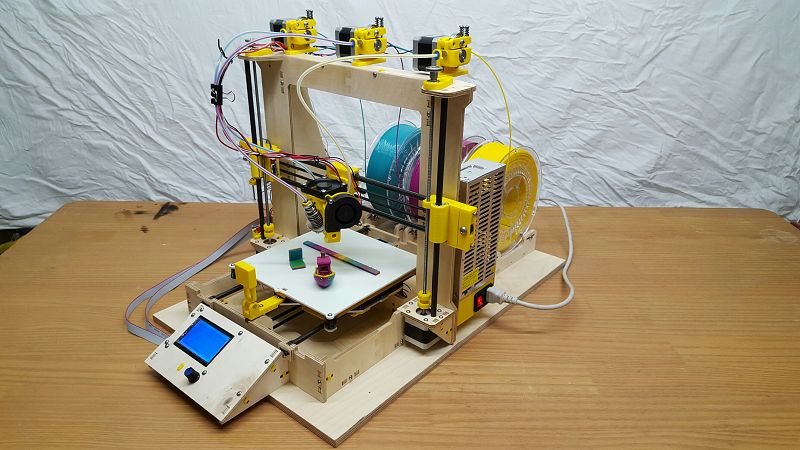
Ich beschäftige mich seit November mit der 3D Druckerei, habe mir 2 Drucker selber gebaut.
Ich bekam dafür viel Hilfe in einer anderen Community.
Da ich stolzer Besitzer einer CNC Fräse bin, seit einigen Jahren Modellflug betreibe, mir schon das ein oder andere Atmel/STM32 Projekt "gebastelt" habe, stellte der Drucker keine sehr große Herrausforderung da.
Zudem musste eine neue Herrausforderung her.
So, nun zum eigentlichen Thema.
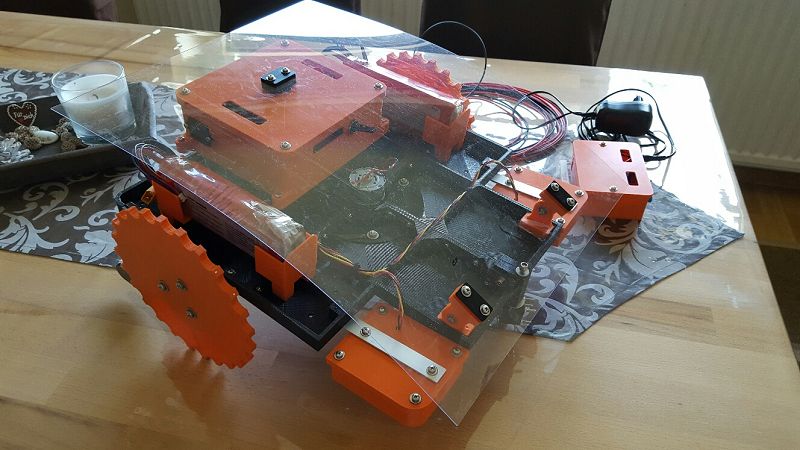
Nach einiger Druckzeit steht der Mower nun vor mir.

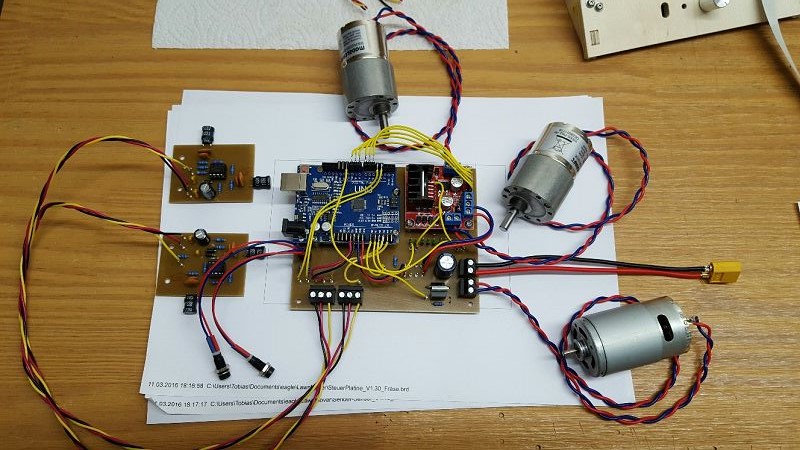
Die Elektronik basiert auf einem ArduinoUno mit L297 Motortreiber.
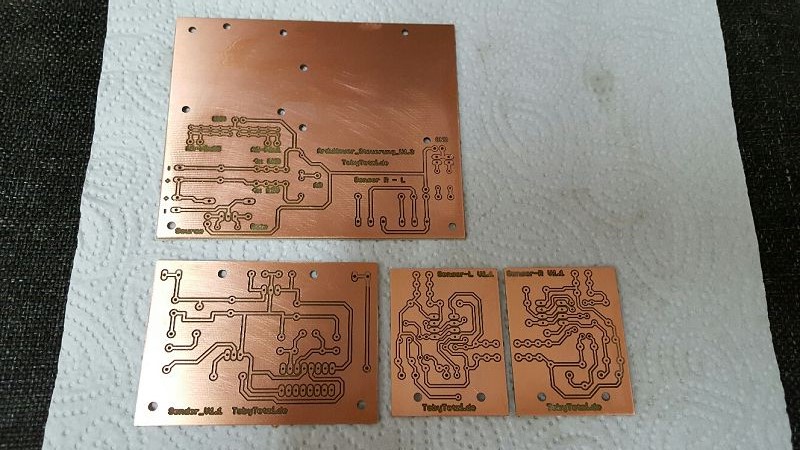
Diese soll auf Lochraster aufgebaut werden, dafür habe ich mir aber Platinen gemacht.
Der gedruckte Mower hat ein sehr einfaches Chaos Mähprinzip.
Die Firmware besteht aus Perimeter und Kollisions Erkennung und hat eine Akkuüberwachung.
Hier meine ersten "Gehversuche"
Kollisions Test
Perimeter Test
Da ich, wie gesagt, Modellflieger bin, muss auch eine RC Anbindung her.
Diese war schnell erledigt. Ist aber eher nur eine Spielerei.
RC Test
Da mir das Chaos Mähprinzig nicht wirklich gefällt, habe ich einige weitere Fragen.
Wie kann man unterscheiden ob man in oder außerhalb der Begrenzungsschleife ist?
Hier steht etwas davon, das eine Erkennung statt findet.
Link
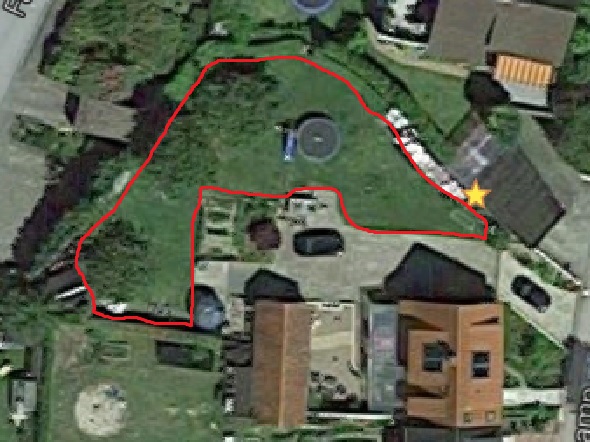
Was benötigt man, um eine virtuelle Karte des Rasens zu erstellen, die später Bahn für Bahn abgefahren werden soll?
Odometrie und Kompass, reicht das aus? Wozu dann noch GPS, da es doch sehr ungenau ist.
Leider habe ich noch kein Projekt mit Odometrie bzw, Kompass gehabt.
Ich habe mir ein paar Daten und Anleitungen zum Bosch Ingedo angesehen, so soll es mal werden, vielleicht sogar besser?
Ich würde gerne eine Ladestation bauen, die der Mower selbstständig findet, dazu muss der Mower natürlich wissen, wo sich diese befindet.
Ich hoffe, ich bin bei Euch richtig aufgehoben, und kann hier noch so einiges zum Thema lernen, und Euch weiterhin noch etwas mit "Anfängerfragen" bombadieren kann.
Lieben Gruß Toby
ich bin Toby, etwas über viezig und bin durch Zufall auf diesen "ArduMower" gestoßen.
Ich hoffe nicht, das ich jetzt von Euch "ausgelacht" werde. (Diese Seite hier war mir zuvor leider nicht bekannt)
Ardumower
Ich beschäftige mich seit November mit der 3D Druckerei, habe mir 2 Drucker selber gebaut.
Ich bekam dafür viel Hilfe in einer anderen Community.
Da ich stolzer Besitzer einer CNC Fräse bin, seit einigen Jahren Modellflug betreibe, mir schon das ein oder andere Atmel/STM32 Projekt "gebastelt" habe, stellte der Drucker keine sehr große Herrausforderung da.
Zudem musste eine neue Herrausforderung her.
So, nun zum eigentlichen Thema.
Nach einiger Druckzeit steht der Mower nun vor mir.
Die Elektronik basiert auf einem ArduinoUno mit L297 Motortreiber.
Diese soll auf Lochraster aufgebaut werden, dafür habe ich mir aber Platinen gemacht.
Der gedruckte Mower hat ein sehr einfaches Chaos Mähprinzip.
Die Firmware besteht aus Perimeter und Kollisions Erkennung und hat eine Akkuüberwachung.
Hier meine ersten "Gehversuche"
Kollisions Test
Perimeter Test
Da ich, wie gesagt, Modellflieger bin, muss auch eine RC Anbindung her.
Diese war schnell erledigt. Ist aber eher nur eine Spielerei.
RC Test
Da mir das Chaos Mähprinzig nicht wirklich gefällt, habe ich einige weitere Fragen.
Wie kann man unterscheiden ob man in oder außerhalb der Begrenzungsschleife ist?
Hier steht etwas davon, das eine Erkennung statt findet.
Link
Was benötigt man, um eine virtuelle Karte des Rasens zu erstellen, die später Bahn für Bahn abgefahren werden soll?
Odometrie und Kompass, reicht das aus? Wozu dann noch GPS, da es doch sehr ungenau ist.
Leider habe ich noch kein Projekt mit Odometrie bzw, Kompass gehabt.
Ich habe mir ein paar Daten und Anleitungen zum Bosch Ingedo angesehen, so soll es mal werden, vielleicht sogar besser?
Ich würde gerne eine Ladestation bauen, die der Mower selbstständig findet, dazu muss der Mower natürlich wissen, wo sich diese befindet.
Ich hoffe, ich bin bei Euch richtig aufgehoben, und kann hier noch so einiges zum Thema lernen, und Euch weiterhin noch etwas mit "Anfängerfragen" bombadieren kann.
Lieben Gruß Toby
") du hast einen netten Selbstbau Rasenroboter.
du hast einen netten Selbstbau Rasenroboter.
{kind=link}
{kind=link}
{kind=link}